 2014, Vol. 35
2014, Vol. 35Shanghai University
Article Information
- Hui-bin WU, Feng-xiang MEI. 2014.
- Form invariance and conserved quantity for weakly nonholonomic system
- Appl. Math. Mech. -Engl. Ed., 35(10): 1293-1300
- http://dx.doi.org/10.1007/s10483-014-1863-9
Article History
- Received 2013-4-12;
- in final form 2014-3-17




The researches on the nonholonomic dynamics have important theoretical value and noticeable sense for applications. Remarkable advance has been achieved [1, 2, 3, 4, 5, 6, 7, 8] . Also,a lot of results on the form invariance and conserved quantity for mechanical systems have been obtained [9, 10, 11, 12, 13, 14, 15, 16, 17, 18] . The weakly nonholonomic system (WNS) is a special one whose constraint equations contain a small parameter. When the small parameter equals 0,the system becomes a holonomic system (HS). Mei [19, 20, 21] studied the equations of motion and approximate solutions,the canonical transformation,and the stability for the WNS,respectively. Following Refs. [19]-[21],we work on its form invariance and the relevant conserved quantity. First,the differential equations of motion are established for a WNS. Second,the definition and the criterion of form invariance of the system are given. Finally,the condition under which the form invariance leads to a conserved quantity and the form of conserved quantity are presented. 2 Differential equations of motion for WNS
Assume that the position of a mechanical system is determined by the n generalized coordinates q s(s = 1,2,· · · ,n),and its motion is subject to the g ideal bilateral linear homogeneous nonholonomic constraints
where β =1,2,· · · ,g ; σ =1,2,· · · ,ε; ε = n − g; s = 1,2,· · · ,n, and µ is a small parameter. When µ = 0,the constraint equations (1) become holonomic. The differential equations of motion of the system can then be expressed as where L = L(q,

 ,t) is the Lagrangian,Qs = Qs(q,,t) are non-potential generalized forces,
and λβ
are undetermined multipliers. Suppose that the system is nonsingular,namely,
,t) is the Lagrangian,Qs = Qs(q,,t) are non-potential generalized forces,
and λβ
are undetermined multipliers. Suppose that the system is nonsingular,namely,
 ,t,and µ,and (2) can be rewritten as
which are called the HS equations corresponding to the WNS (1) and (2),where
are the generalized constraint forces. It can be proved that the solution to the corresponding
HS (3) gives the motion of the WNS,if the initial conditions of motion satisfy (1).
In order to discuss the approximate solution to the WNS,we expand the generalized constraint forces Λs as a power-series in the parameter µ as follows:
Then,we get the first degree approximation of (3)
Also,all generalized accelerations can be solved from (3),written as
and from (6),they can be written as
3 Definition and criterion of form invariance
,t,and µ,and (2) can be rewritten as
which are called the HS equations corresponding to the WNS (1) and (2),where
are the generalized constraint forces. It can be proved that the solution to the corresponding
HS (3) gives the motion of the WNS,if the initial conditions of motion satisfy (1).
In order to discuss the approximate solution to the WNS,we expand the generalized constraint forces Λs as a power-series in the parameter µ as follows:
Then,we get the first degree approximation of (3)
Also,all generalized accelerations can be solved from (3),written as
and from (6),they can be written as
3 Definition and criterion of form invariance






Choose the infinitesimal transformations for the group of time and coordinates as follows:
where ε is an infinitesimal parameter,ξ0and ξs are the generating functions of the infinitesimal transformations. Suppose that the dynamical functions L,Qs,Λs,and fβbecome L*,Q*s,Λ*s,and f*β,respectively,after the infinitesimal transformation (9). Then,we have where


Definition 1 If the form of equations keeps invariant when the dynamical functions are replaced by the corresponding transformed ones,respectively,then such invariance is called form invariance. According to the definition,the form invariance for equations of motion (3) is
where




Criterion 1 For the HS (3) corresponding to the WNS (1) and (2),if the infinitesimal generators ξ0 and ξs satisfy (14),then the relevant invariance is a form invariance of the system.
Criterion 2 For the WNS (1) and (2),if the infinitesimal generators ξ 0 and ξs satisfy (14) and (15),then the relevant invariance is a form invariance of the system.
Criterion 3 For the first degree approximate HS (6) corresponding to the WNS (1) and (2),if the infinitesimal generators ξ0 and ξs satisfy (16),then the relevant invariance is a form invariance of the system.
Criterion 4 For the first degree approximate system of the WNS (1) and (2),if the infinitesimal generators ξ0 and ξs satisfy (16) and (15),then the relevant invariance is a form invariance of the system. 4 Conserved quantity deduced from form invariance
Based on the theory of form invariance for general nonholonomic systems (NSs) [22] ,the form invariance for WNSs can also lead to a conserved quantity.
Proposition 1 If the infinitesimal generators ξ0
and ξs
are ones of form invariance for
the corresponding HS (3) and there exists a gauge function GF = GF
(q,,t,µ) satisfying the
structure equation



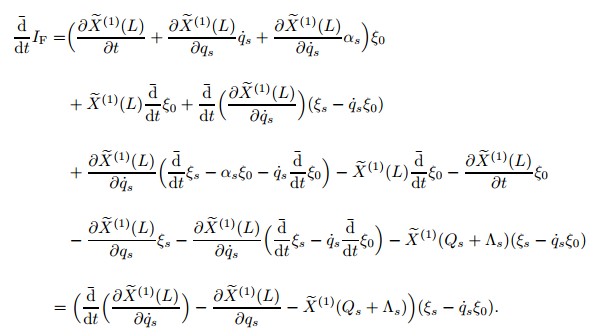
Proof First,we have
Proposition 2 If the infinitesimal generators ξ0
and ξs
are ones of form invariance for
the WNS (1) and (2) and there exists a gauge function GF = GF
(q,,t) satisfying the structure
equation (17),then the form invariance can lead to the conserved quantity (19).
Proposition 3 If the infinitesimal generators ξ0
and ξs
are ones of form invariance for the
first degree approximate HS (6) and there exists a gauge function GF = GF
(q,,t,µ) satisfying
the structure equation


Proposition 4 If the infinitesimal generators ξ0
and ξs
are ones of form invariance for the
first degree approximate system of the WNS and there exists a gauge function GF = GF
(q,,t,µ)
satisfying the structure equation (20),then the form invariance can lead to the conserved quantity
(19).
Making use of the above propositions,one can obtain the conserved quantities deduced from the form invariance for WNSs. 5 Illustrative example
In the following,we give an example to illustrate the application of the above results.
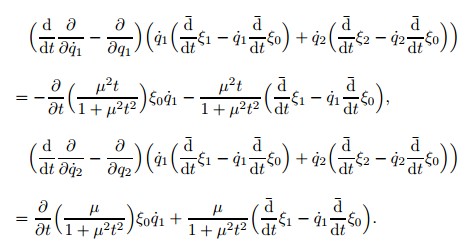
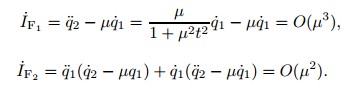
A WNS is
Discuss its form invariances and their corresponding conserved quantities.
From (2),we can get












For mechanical systems,the study on the form invariance and the conserved quantity deduced from it is more complex than those of Noether symmetry and Noether conserved quantity. Especially for NSs,including WNSs,there are more restrictions to their form invariance than those of the corresponding HSs. Also,for deducing conserved quantities from the form invariance,the structure equation must be satisfied. However,in respect of finding the conserved quantity,sometimes we only need to discuss the form invariance and conserved quantity for the corresponding HSs,because the motion of an NS is in the solutions of the corresponding HS.
| [1] | Neimark, J. I. and Fufaev, N. A. Dynamics of Nonholonomic Systems, AMS, Providence, Rhode Island (1972) |
| [2] | Mei, F. X. Foundations of Mechanics of Nonholonomic Systems (in Chinese), Beijing Institute of Technology Press, Beijing (1985) |
| [3] | Bloch, A. M., Krishnaprasad, P. S., Marsden, J. E., and Murray, R. M. Nonholonomic mechanical systems with symmetry. Archive for Rational Mechanics and Analysis, 136(1), 21-99 (1996) |
| [4] | Papastavridis, J. G. A panoramic overview of the principles and equations of motion of advanced engineering dynamics. Applied Mechanics Reviews, 51(4), 239-265 (1998) |
| [5] | Ostrovskaya, S, and Angels, J. Nonholonomic systems revisited within the framework of analytical mechanics. Applied Mechanics Reviews, 51(7), 415-433 (1998) |
| [6] | Mei, F. X. Nonholonomic mechanics. Applied Mechanics Reviews, 53(11), 283-305 (2000) |
| [7] | Guo, Y. X., Luo, S. K., and Mei, F. X. Progress of geometric dynamics of non-holonomic con- strained mechanical systems: Lagrange theory and others (in Chinese). Advances in Mechanics, 34(4), 477-492 (2004) |
| [8] | Zegzhda, S. A., Soltakhanov, S. K., and Yushkov, M. P. Equations of motion of nonholonomic systems and variational principles of mechanics (in Russian). New Kind of Control Problems, FIMATLIT, Moscow (2005) |
| [9] | Mei, F. X. Form invariance of Lagrange system. Journal of Beijing Institute of Technology, 9(2), 120-124 (2000) |
| [10] | Wang, S. Y. and Mei, F. X. Form invariance and Lie symmetry of equations of non-holonomic systems. Chinese Physics, 11(1), 5-8 (2002) |
| [11] | Zhang, H. B. and Gu, S. L. Lie symmetries and conserved quantities of Birkhoff systems with unilateral constraints. Chinese Physics, 11(8), 765-770 (2002) |
| [12] | Mei, F. X. and Zhang, Y. Form invariance for systems of generalized classical mechanics. Chinese Physics, 12(10), 1058-1061 (2003) |
| [13] | Wu, H. B. Lie-form invariance of the Lagrange system. Chinese Physics, 14(3), 452-454 (2005) |
| [14] | Lou, Z. M. The parametric orbits and the form invariance of three-body in one-dimension. Chinese Physics, 14(4), 660-662 (2005) |
| [15] | Jia, L. Q., Yu, H. S., and Zheng, S. W. Mei symmetry of Tzénoff equations of holonomic system. Chinese Physics, 15(7), 1399-1402 (2006) |
| [16] | Luo, S. K. Mei symmetry, Noether symmetry and Lie symmetry of Hamiltonian system (in Chi- nese). Acta Physica Sinica, 52(12), 2941-2944 (2003) |
| [17] | Peng, Y., Liao, Y. P., and Fang, J. H. On Mei symmetry of Lagrangian system and Hamiltonian system (in Chinese). Acta Physica Sinica, 54(2), 496-499 (2005) |
| [18] | Fu, J. L., Liu, H. J., and Tang, Y. F. A series of non-Noether conservative quantities and Mei symmetries of nonconservative systems. Chinese Physics, 16(3), 599-604 (2007) |
| [19] | Mei, F. X. Equations of motion for weak nonholonomic systems and their approximate solution (in Chinese). Journal of Beijing Institute of Technology, 9(3), 10-17 (1989) |
| [20] | Mei, F. X. Canonical transformation for weak nonholonomic systems. Chinese Science Bulletin, 38(4), 281-285 (1993) |
| [21] | Mei, F. X. On the stability of one type of weakly nonholonomic systems (in Chinese). Journal of Beijing Institute of Technology, 15(3), 237-242 (1995) |