Applied Mathematics and Mechanics (English Edition) ›› 2024, Vol. 45 ›› Issue (3): 497-514.doi: https://doi.org/10.1007/s10483-024-3093-7
• Articles • Previous Articles Next Articles
Sha WEI1,2, Yifeng CHEN1, Hu DING1, Liqun CHEN1,2,*( )
)
Received:2023-10-26
Online:2024-03-03
Published:2024-02-24
Contact:
Liqun CHEN
E-mail:lqchen@shu.edu.cn
Supported by:2010 MSC Number:
Sha WEI, Yifeng CHEN, Hu DING, Liqun CHEN. An improved interval model updating method via adaptive Kriging models. Applied Mathematics and Mechanics (English Edition), 2024, 45(3): 497-514.
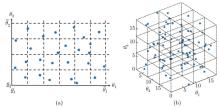
Fig. 1
(a) 2D representations and (b) 3D representations of the gridding algorithm (color online)"
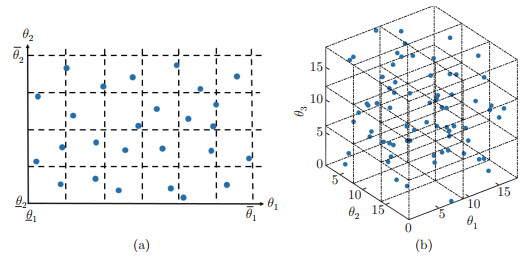

Fig. 2
Flow chart of the proposed method (color online)"
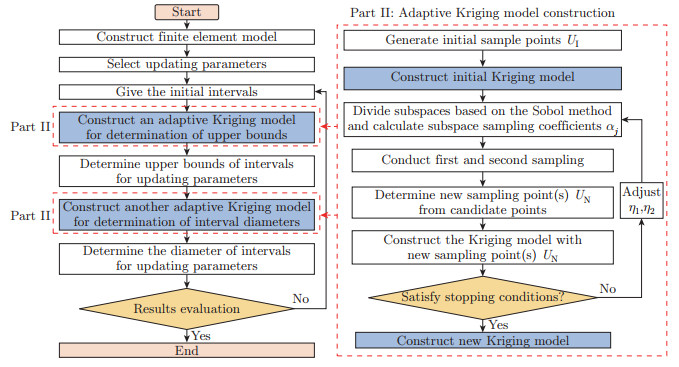
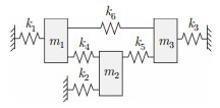
Fig. 3
Schematic representation of the mass-spring system"
Table 1
Global sensitivity of outputs to parameters to be updated (well-separated modes: k1, k2, and k5"
 |
Table 2
Comparison of relative errors in parameter intervals of the mass-spring systems (well-separated modes: k1, k2, and k5)"
 |

Fig. 4
True, initial, and updated output spaces of the mass-spring system (well-separated modes: k1, k2, and k5) (color online)"
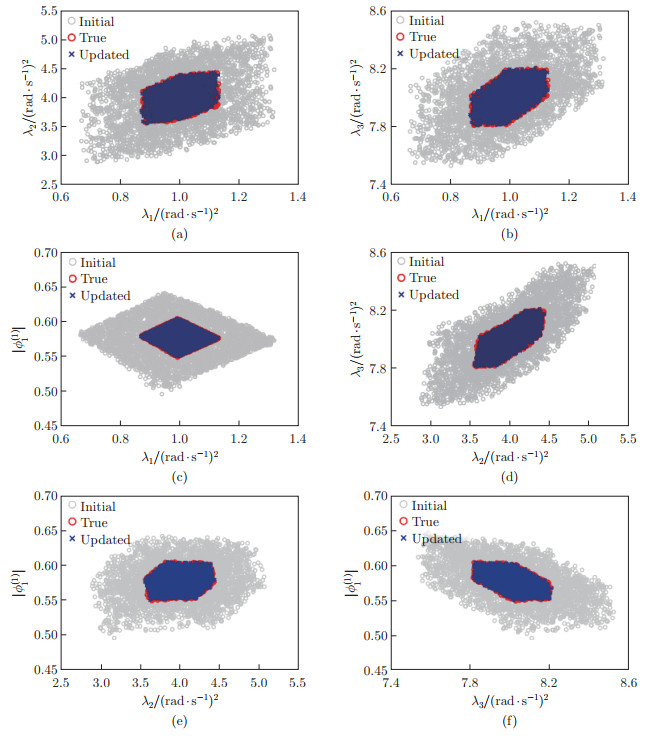
Table 3
Global sensitivity of outputs to parameters to be updated (close modes: k2, k4, and k5)"
 |
Table 4
Comparison of relative errors in parameter intervals of the mass-spring systems (close modes: k2, k4, and k5)"
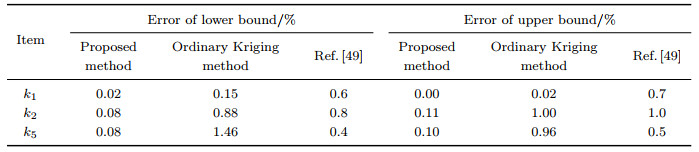 |

Fig. 5
True, initial, and updated output spaces of the mass-spring system (close modes: k2, k4, and k5) (color online)"
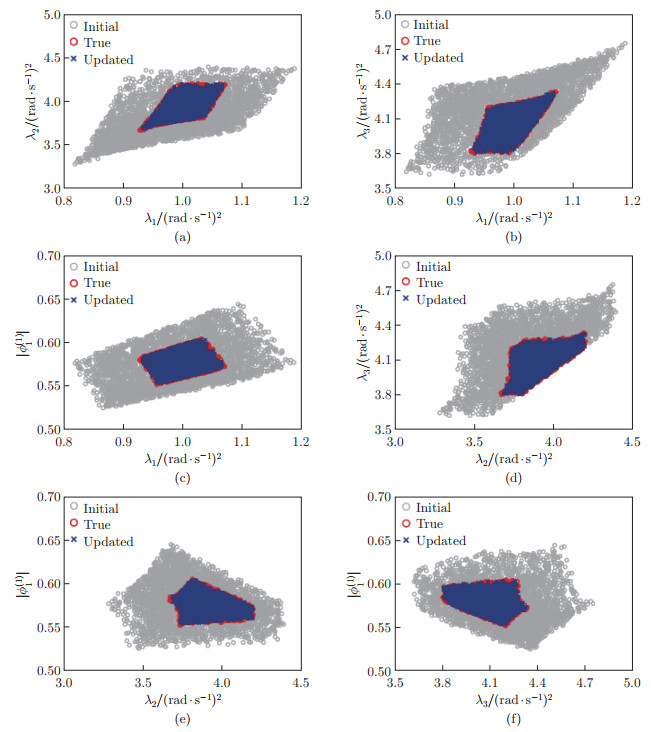
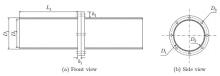
Fig. 6
Schematic diagram of a butted cylindrical shell structure"
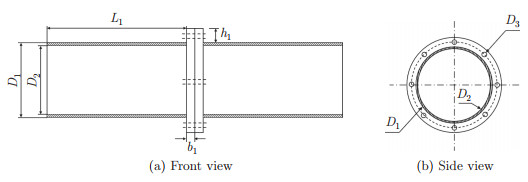
Table 5
Parameters of the butted cylindrical shell structure"
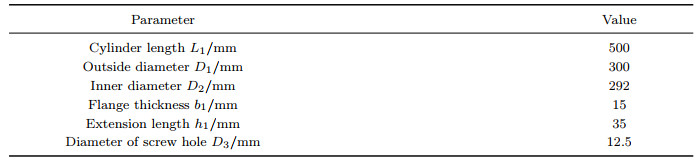 |

Fig. 7
(a) The butted cylindrical shell structure; (b) finite element model of the butted cylindrical shell structure (color online)"
Table 6
Global sensitivity of outputs to parameters to be updated (E, ν)"
 |
Table 7
Updated interval bounds of the butted cylindrical shell structure (E, ν)"
 |
Table 8
Comparison of relative errors in frequency intervals of the butted cylindrical shell structure"
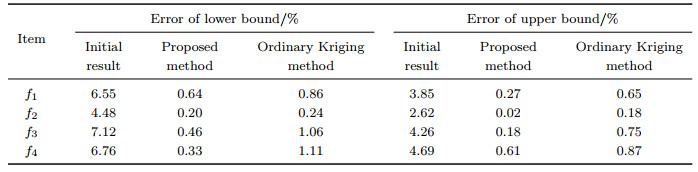 |

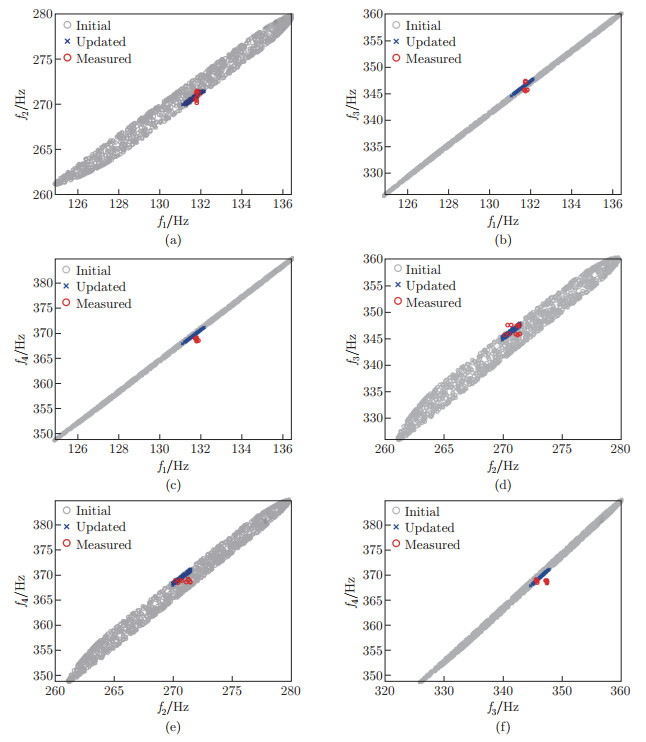
Fig. 8
Measured, initial, and updated output spaces of the butted cylindrical shell structure (color online)"
| 1 | HEMEZ, F. M., and DOEBLING, S. W. Review and assessment of model updating for non-linear, transient dynamics. Mechanical Systems and Signal Processing, 15 (1), 45- 74 (2001) |
| 2 | REZAIEE-PAJAND, M., ENTEZAMI, A., and SARMADI, H. A sensitivity-based finite element model updating based on unconstrained optimization problem and regularized solution methods. Structural Control and Health Monitoring, 27 (5), e2481 (2020) |
| 3 | WAN, H. P., and REN, W. X. Parameter selection in finite-element-model updating by global sensitivity analysis using Gaussian process metamodel. Journal of Structural Engineering, 141 (6), 04014164 (2015) |
| 4 | GRIP, N., SABOUROVA, N., and TU, Y. Sensitivity-based model updating for structural damage identification using total variation regularization. Mechanical Systems and Signal Processing, 84, 365- 383 (2017) |
| 5 | HE, Y., YANG, J. P., and YU, J. Surrogate-assisted finite element model updating for detecting scour depths in a continuous bridge. Journal of Scientific Computing, 69, 101996 (2023) |
| 6 | WANG, X. M., ZHANG, J. D., SUN, Y., WU, Z. F., TCHUENTE, N. F. C., and YANG, F. Stiffness identification of deteriorated PC bridges by a FEMU method based on the LM-assisted PSO-Kriging model. Structures, 43, 374- 387 (2022) |
| 7 | ZHU, Q. Y., HAN, Q. K., LIU, J. G., and YU, C. S. High-accuracy finite element model updating a framed structure based on response surface method and partition modification. Aerospace, 10 (1), 79 (2023) |
| 8 | FRISWELL, M. I., and MOTTERSHEAD, J. E. Finite Element Model Updating in Structural Dynamics, Springer Netherlands, Dordrecht (1995) |
| 9 | EREIZ, S., DUVNJAK, I.., and FERNANDO JIMÉNEZ-ALONSO, J. Review of finite element model updating methods for structural applications. Structures, 41, 684- 723 (2022) |
| 10 | SEHGAL, S., and KUMAR, H. Structural dynamic model updating techniques: a state of the art review. Archives of Computational Methods in Engineering, 23 (3), 515- 533 (2016) |
| 11 | SIMOEN, E., DE ROECK, G., and LOMBAERT, G. Dealing with uncertainty in model updating for damage assessment: a review. Mechanical Systems and Signal Processing, 56-57, 123- 149 (2015) |
| 12 | CELIK, O. C., and ELLINGWOOD, B. R. Seismic fragilities for non-ductile reinforced concrete frames-role of aleatoric and epistemic uncertainties. Structural Safety, 32 (1), 1- 12 (2010) |
| 13 | HARIRI-ARDEBILI, M. A., SEYED-KOLBADI, S. M., and NOORI, A. Response surface method for material uncertainty quantification of infrastructures. Shock and Vibration, 2018, 1784203 (2018) |
| 14 | JIANG, C., ZHENG, J., and HAN, X. Probability-interval hybrid uncertainty analysis for structures with both aleatory and epistemic uncertainties: a review. Structural and Multidisciplinary Optimization, 57 (6), 2485- 2502 (2018) |
| 15 | JENSEN, H. A., MILLAS, E., KUSANOVIC, D., and PAPADIMITRIOU, C. Model-reduction techniques for Bayesian finite element model updating using dynamic response data. Computer Methods in Applied Mechanics and Engineering, 279, 301- 324 (2014) |
| 16 | WU, Z., HUANG, B., CHEN, H., and ZHANG, H. A new homotopy approach for stochastic static model updating with large uncertain measurement errors. Applied Mathematical Modelling, 98, 758- 782 (2021) |
| 17 | NI, P. H., LI, J., HAO, H., HAN, Q., and DU, X. L. Probabilistic model updating via variational Bayesian inference and adaptive Gaussian process modeling. Computer Methods in Applied Mechanics and Engineering, 383, 113915 (2021) |
| 18 | LIU, Y., and DUAN, Z. Fuzzy finite element model updating of bridges by considering the uncertainty of the measured modal parameters. Science China Technological Sciences, 55 (11), 3109- 3117 (2012) |
| 19 | KHODAPARAST, H. H., GOVERS, Y., DAYYANI, I., ADHIKARI, S., LINK, M., FRISWELL, M. I., MOTTERSHEAD, J. E., and SIENZ, J. Fuzzy finite element model updating of the DLR AIRMOD test structure. Applied Mathematical Modelling, 52, 512- 526 (2017) |
| 20 | LIAO, B., ZHAO, R., YU, K., and LIU, C. A novel interval model updating framework based on correlation propagation and matrix-similarity method. Mechanical Systems and Signal Processing, 162, 108039 (2022) |
| 21 | ZHAO, Y., YANG, J., FAES, M. G.R., BI, S., and WANG, Y. The sub-interval similarity: a general uncertainty quantification metric for both stochastic and interval model updating. Mechanical Systems and Signal Processing, 178, 109319 (2022) |
| 22 |
SU, J. B., SHAO, G. J., and CHU, W. J. Sensitivity analysis of soil parameters based on interval. Applied Mathematics and Mechanics (English Edition), 29 (12), 1651- 1662 (2008)
doi: 10.1007/s10483-008-1213-y |
| 23 | FEDELE, F., MUHANNA, R. L., XIAO, N., and MULLEN, R. L. Interval-based approach for uncertainty propagation in inverse problems. Journal of Engineering Mechanics, 141 (1), 06014013 (2015) |
| 24 | CHEN, N., YU, D., and XIA, B. Hybrid uncertain analysis for the prediction of exterior acoustic field with interval and random parameters. Computers & Structures, 141, 9- 18 (2014) |
| 25 | QIU, Z., and WANG, P. Parameter vertex method and its parallel solution for evaluating the dynamic response bounds of structures with interval parameters. Science China Physics, Mechanics & Astronomy, 61 (6), 064612 (2018) |
| 26 | FENG, H., RAKHEJA, S., and SHANGGUAN, W. B. Analysis and optimization for generated axial force of a drive-shaft system with interval uncertainty. Structural and Multidisciplinary Optimization, 63 (1), 197- 210 (2021) |
| 27 | MO, J., YAN, W. J., YUEN, K. V., and BEER, M. Efficient inner-outer decoupling scheme for non-probabilistic model updating with high dimensional model representation and Chebyshev approximation. Mechanical Systems and Signal Processing, 188, 110040 (2023) |
| 28 | SHI, Q., WANG, X., WANG, R., CHEN, X., and MA, Y. An interval updating model for composite structures optimization. Composite Structures, 209, 177- 191 (2019) |
| 29 | LI, S. L., LI. H., and OU, J. P. Model updating for uncertain structures with interval parameters. Proceedings of the Asia-Pacific Workshop on Structural Health Monitoring, Yokohama (2006) |
| 30 | DENG, Z. M., GUO, Z. P., and ZHANG, X. J. Interval model updating using perturbation method and radial basis function neural networks. Mechanical Systems and Signal Processing, 84, 699- 716 (2017) |
| 31 | ZHENG, B., YU, K., LIU, S., and ZHAO, R. Interval model updating using universal grey mathematics and Gaussian process regression model. Mechanical Systems and Signal Processing, 141, 106455 (2020) |
| 32 | DING, Y. J., WANG, Z. C., CHEN, G. D., REN, W. X., and XIN, Y. Markov chain Monte Carlo-based Bayesian method for nonlinear stochastic model updating. Journal of Sound and Vibration, 520, 116595 (2022) |
| 33 |
REN, Y., LIU, Z., KANG, Z., and PANG, Y. Data-driven optimization study of the multi-relaxation-time lattice Boltzmann method for solid-liquid phase change. Applied Mathematics and Mechanics (English Edition), 44 (1), 159- 172 (2023)
doi: 10.1007/s10483-023-2946-7 |
| 34 | ZHOU, L. R., WANG, L., CHEN, L., and OU, J. P. Structural finite element model updating by using response surfaces and radial basis functions. Advances in Structural Engineering, 19 (9), 1446- 1462 (2016) |
| 35 | KESHTEGAR, B., MERT, C., and KISI, O. Comparison of four heuristic regression techniques in solar radiation modeling: Kriging method vs RSM, MARS and M5 model tree. Renewable and Sustainable Energy Reviews, 81, 330- 341 (2018) |
| 36 | GIOVANIS, D. G., PAPAIOANNOU, I., STRAUB, D., and PAPADOPOULOS, V. Bayesian updating with subset simulation using artificial neural networks. Computer Methods in Applied Mechanics and Engineering, 319, 124- 145 (2017) |
| 37 |
ZHAO, K., GAO, Z. H., and HUANG, J. T. Robust design of natural laminar flow supercritical airfoil by multi-objective evolution method. Applied Mathematics and Mechanics (English Edition), 35 (2), 191- 202 (2014)
doi: 10.1007/s10483-014-1783-6 |
| 38 | LIN, C. H. Composite recurrent Laguerre orthogonal polynomials neural network dynamic control for continuously variable transmission system using altered particle swarm optimization. Nonlinear Dynamics, 81 (3), 1219- 1245 (2015) |
| 39 |
XU, Z. Y., DU, L., WANG, H. P., and DENG, Z. C. Particle swarm optimization-based algorithm of a symplectic method for robotic dynamics and control. Applied Mathematics and Mechanics (English Edition), 40 (1), 111- 126 (2019)
doi: 10.1007/s10483-019-2412-6 |
| 40 | LI, Q. X., LIU, S. F., and FORREST, J. Y. L. Fundamental definitions and calculation rules of grey mathematics: a review work. Journal of Systems Engineering and Electronics, 26 (6), 1254- 1267 (2015) |
| 41 | QIAN, J. C., YI, J. X., CHENG, Y. S., LIU, J., and ZHOU, Q. A sequential constraints updating approach for Kriging surrogate model-assisted engineering optimization design problem. Engineering with Computers, 36 (3), 993- 1009 (2020) |
| 42 | GARUD, S. S., KARIMI, I. A., and KRAFT, M. Design of computer experiments: a review. Computers & Chemical Engineering, 106, 71- 95 (2017) |
| 43 | CHEN, C. H., LONG, J. Q., CHEN, W. Z., LIU, Z. F., and GUO, J. Y. Modeling and prediction of spindle dynamic precision using the Kriging-based response surface method with a novel sampling strategy. Nonlinear Dynamics, 111 (1), 559- 579 (2023) |
| 44 | SOBOL, I. On sensitivity estimation for nonlinear mathematical models. Matematicheskoe Modelirovanie, 1, 112- 118 (1990) |
| 45 | KUCHERENKO, S., DELPUECH, B., IOOSS, B., and TARANTOLA, S. Application of the control variate technique to estimation of total sensitivity indices. Reliability Engineering and System Safety, 134, 251- 259 (2015) |
| 46 | YOU, T., GONG, D., ZHOU, J., SUN, Y., and CHEN, J. Frequency response function-based model updating of flexible vehicle body using experiment modal parameter. Vehicle System Dynamics, 60 (11), 3930- 3954 (2022) |
| 47 | REN, M. L., HUANG, X. D., ZHU, X. X., and SHAO, L. J. Optimized PSO algorithm based on the simplicial algorithm of fixed point theory. Applied Intelligence, 50 (7), 2009- 2024 (2020) |
| 48 | MARES, C., MOTTERSHEAD, J. E., and FRISWELL, M. I. Stochastic model updating: part 1-theory and simulated example. Mechanical Systems and Signal Processing, 20 (7), 1674- 1695 (2006) |
| 49 | KHODAPARAST, H. H., MOTTERSHEAD, J. E., and BADCOCK, K. J. Interval model updating with irreducible uncertainty using the Kriging predictor. Mechanical Systems and Signal Processing, 25 (4), 1204- 1226 (2011) |
| 50 | KHODAPARAST, H. H., MOTTERSHEAD, J. E., and BADCOCK, K. J. Interval model updating: method and application. International Conference on Noise and Vibration Engineering (ISMA)/Conference of USD, Leuven, Belgium, 5277- 5289 (2010) |
| [1] | ZHAO Ke;GAO Zheng-Hong;HUANG Jiang-Tao. Robust design of natural laminar flow supercritical airfoil by multi-objective evolution method [J]. Applied Mathematics and Mechanics (English Edition), 2014, 35(2): 191-202. |
| [2] | WANG Yuan-Yuan;ZHANG Bin-Qian;CHEN Ying-Chun. Robust airfoil optimization based on improved particle swarm optimization method [J]. Applied Mathematics and Mechanics (English Edition), 2011, 32(10): 1245-1254. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||





 Email Alert
Email Alert RSS
RSS