Applied Mathematics and Mechanics (English Edition) ›› 2025, Vol. 46 ›› Issue (12): 2221-2240.doi: https://doi.org/10.1007/s10483-025-3328-7
Weicong ZHANG1, Zengting XU1, Baihong CHEN1, Xiangren KONG1, Rui XIAO1,2, Jin QIAN1,2,†( )
)
Received:2025-07-29
Revised:2025-10-09
Published:2025-11-28
Contact:
Jin QIAN, E-mail: jqian@zju.edu.cnSupported by:2010 MSC Number:
Weicong ZHANG, Zengting XU, Baihong CHEN, Xiangren KONG, Rui XIAO, Jin QIAN. Mechanical design of stimuli-responsive flexible rotary joint using liquid crystal elastomers. Applied Mathematics and Mechanics (English Edition), 2025, 46(12): 2221-2240.
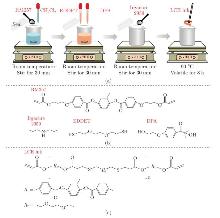
Fig. 1
LCE ink. (a) Manufacturing and preparation process. (b) Molecular formulas of the reactants in the reaction. (c) Molecular formulas of the LCE ink (color online)"

Fig. 2
DMA testing of LCE. (a) The LCE sample and its schematic diagram. (b) The length of LCE samples varying with temperature from −30 ℃ to 140 ℃. (c) The repeatable deformation of LCE in the alternating process of heating and cooling (color online)"
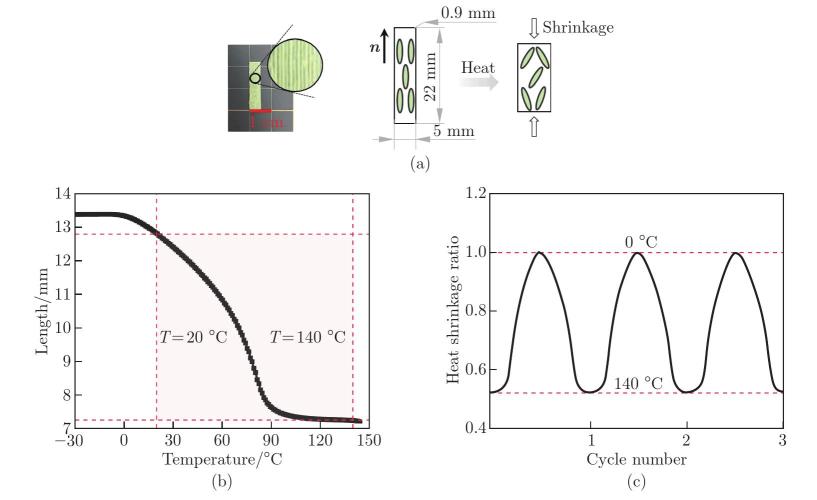

Fig. 3
Constitutive model of LCEs. Under external thermal stimuli, the monodomain LCE undergoes a phase transition from the nematic state to the isotropic state. During this process, the liquid crystal mesogens transition from an ordered configuration to a disordered configuration, which macroscopically manifests as a contraction of the monodomain LCE (color online)"
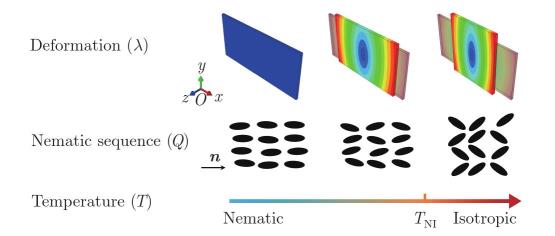

Fig. 4
The settings of ML. (a) Singular values for LCE models and loading history. These results show that 4 singular values are sufficient to well approximate all our experiments. (b) NN model (color online)"
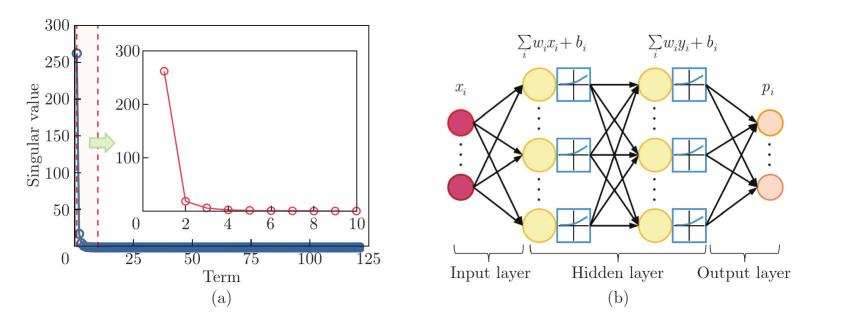
Table 1
Training results for the constitutive model"
| Training detail | Value |
|---|---|
| Hidden layers | {36, 36} |
| Training size | 1 000 |
| Training error/% | 0.3 |
| Validation error/% | 2.7 |
| Optimal parameter prediction error/% | 0.6 |
Fig. 5
Calculated principal components using the constitutive model for LCE versus predicted principal components using NN for cyclic loading. The straight line with slope 1 is utilized to guide the eye (color online)"
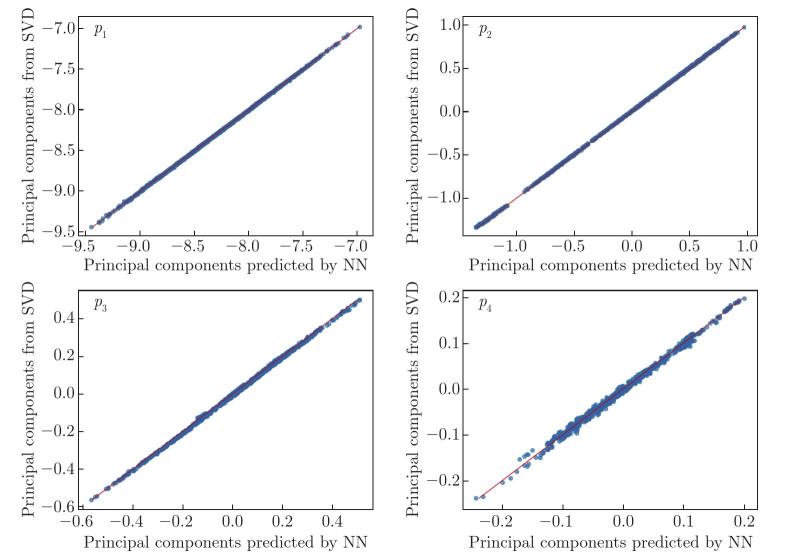
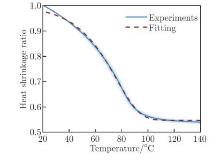
Fig. 6
Comparison of prediction using best fitted parameters from NN (red dotted line) and experimental data (blue bubble) for LCE samples subjected to loading history. Here, the experimental data are the average of 5 independent groups of experimental data, and the light-colored area represents the mean ± standard deviation (color online)"
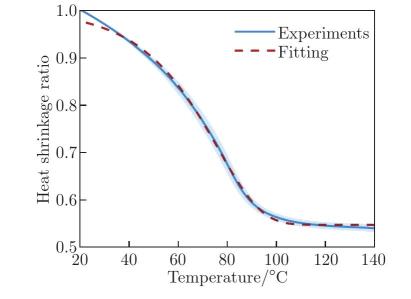

Fig. 7
Analytical model of FRJ. (a) Geometric relationships and assembly of FRJ components. The symbol ‘X’ denotes the number of connection points between the LCEs and the rotor or base. (b) Relationship between rotor size and rotation angle under various configurations with different numbers of connection points (N). (c) Relationship between rotor size and rotation angle when N=4 (color online)"
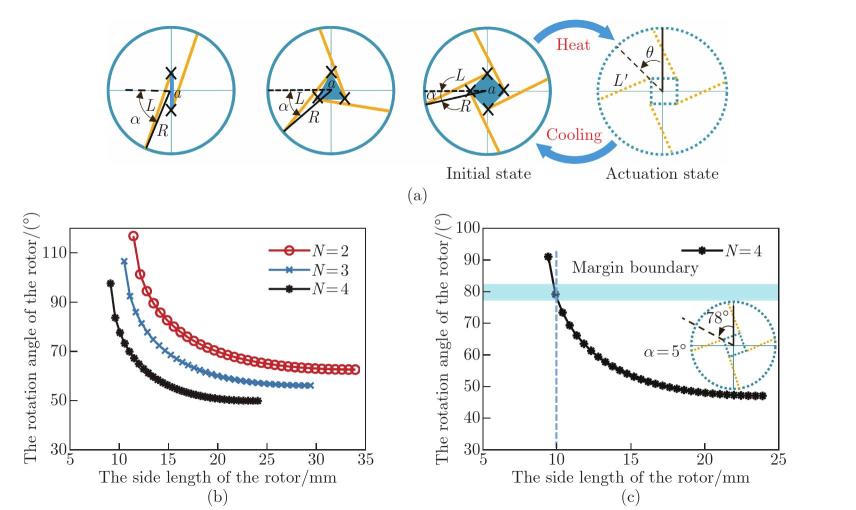

Fig. 8
The variations of θ at λ=0.55 under different values of α (color online)"
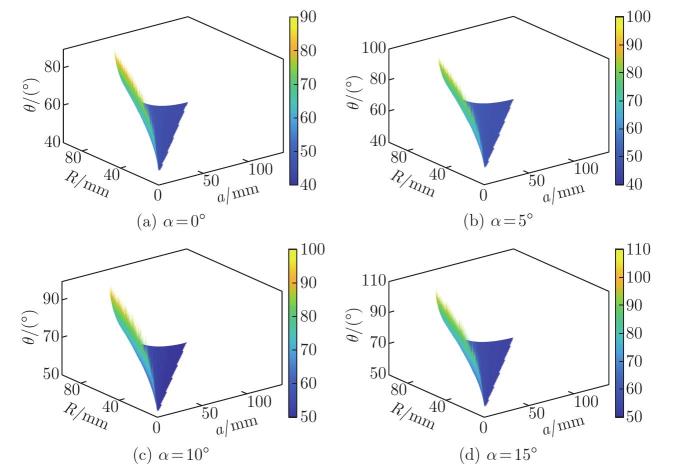

Fig. 9
The variations of θ at α=0∘ under different values of λ (color online)"
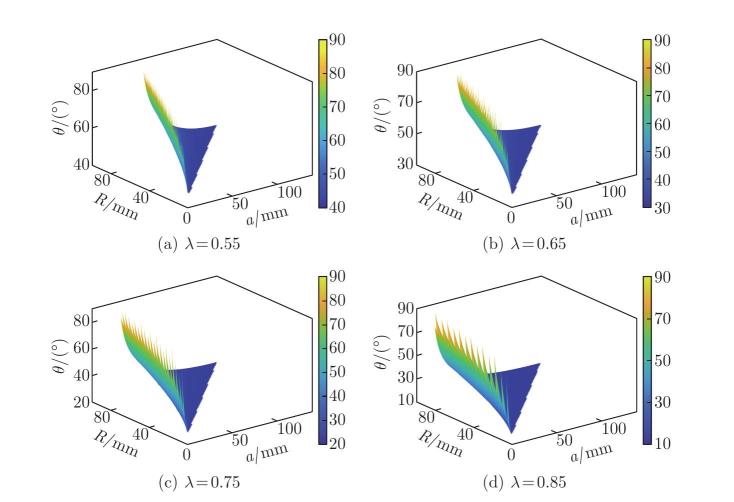
Table 2
Structural parameter setting"
| Number of connection points | ||
|---|---|---|
| 2 | 17 | 30 |
| 3 | 17 | 20 |
| 4 | 17 | 10 |
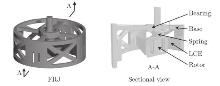
Fig. 10
The section view (A-A) of FRJ and its components"
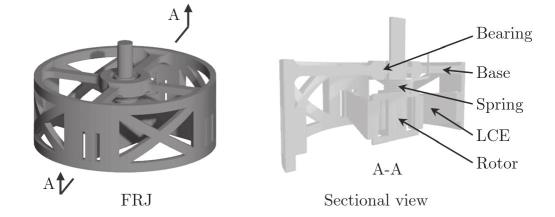
Fig. 11
The setting of FE simulation. (a) Two-dimensional schematic demonstrating the coordinate bases used in the reference and current configurations in ABAQUS. (b) The adopted FE coordinate system of the FRJ (color online)"
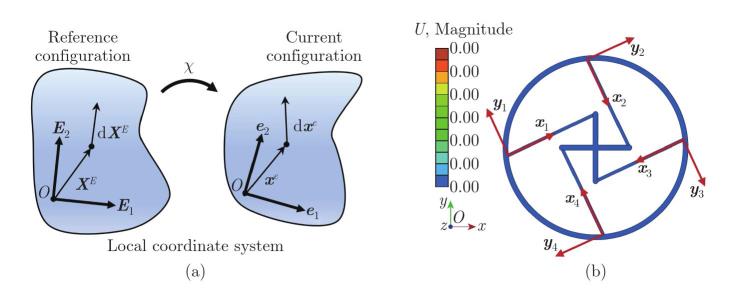
Fig. 12
FEM results of the FRJ actuation. (a) Initial state. (b) Final actuation state (color online)"
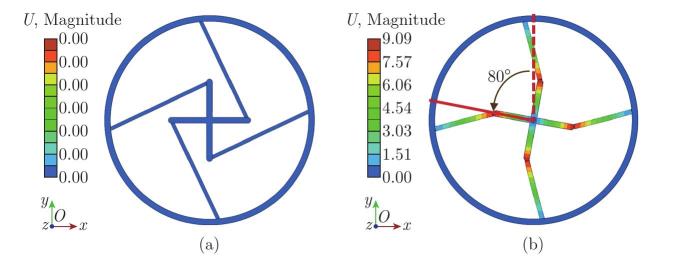
Fig. 13
Fabrication steps of the FRJ: design, printing, and assembly process (scale bar: the background panel cells of the parts are 10 mm×10 mm) (color online)"
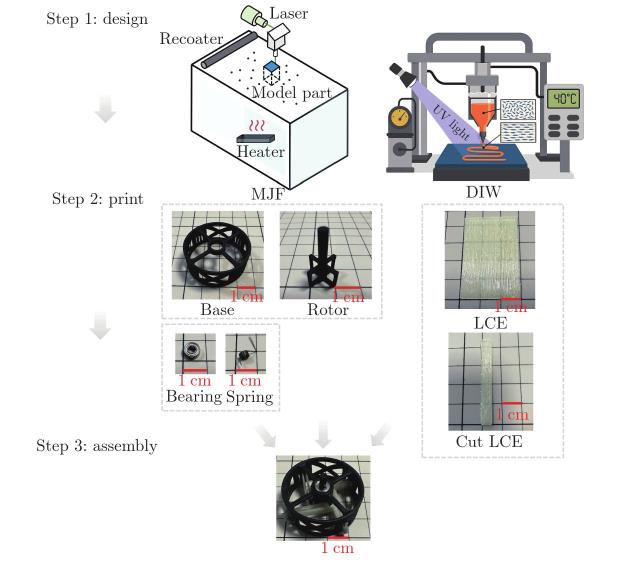

Fig. 14
Measurement of the rotation angle of the FRJ. (a) The rotation angle of the FRJ at room temperature. (b) The rotation angle of the FRJ at 100 ℃ (color online)"
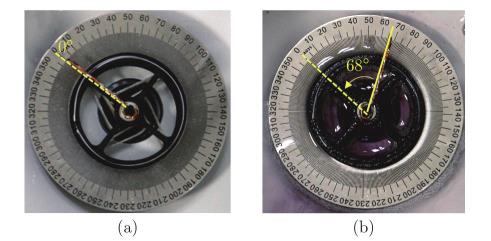
Fig. 15
Comparison of the experimental results with the FE method. (a) FE and experimental curves of FRJ. (b) FE and DMA experimental curves of LCE in FRJ. Note: for consistency, the heat shrinkage ratio in the FE simulations is uniformly adjusted to match the initial shrinkage value of the fitted curve (color online)"


Fig. 16
The application of FRJ. (a) Walking robot equipped with flexible rotating joints. (b) Comparison chart with traditional rotary joints: the size and the mass. (c) The movement trajectory of the robot (color online)"
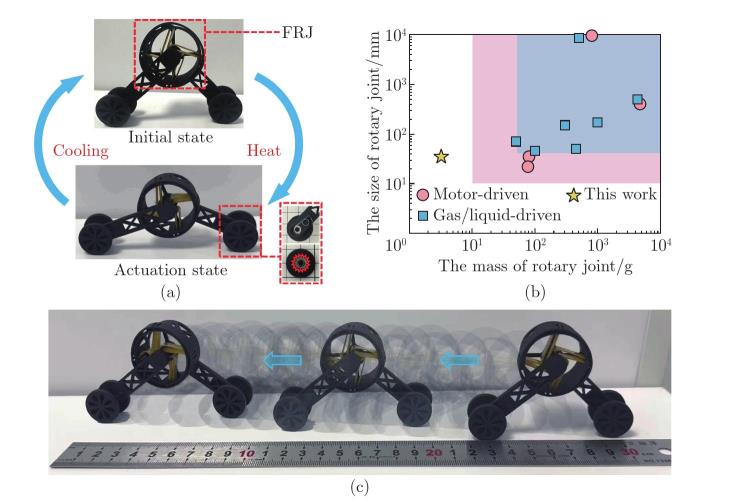
Table A1
Comparison results of the present FRJ and traditional rotary joints"
| Joint | Drive method | Size/mm | Weight/g | Power/W |
|---|---|---|---|---|
| Electromotor[ | Electric | 35 | 80 | 4.5 |
| RV reducer[ | Electric | 4 700 | 1 700 | |
| Maxon EC90 motor[ | Electric | 22 | 600 | 90 |
| Rotating pneumatic clutch[ | Pneumatic | 50 | 450 | – |
| Double-blade rotating cylinder[ | Hydraulic | 500 | 4 300 | – |
| Hydraulic rotary joint[ | Hydraulic | 172 | 1 000 | – |
| Hydraforce PV70 | Hydraulic | – | 50–60 | |
| Bucher hydraulics | Hydraulic | – | ||
| DVP vacuum | Pneumatic | 10–30 | ||
| Maxon EC-max 16 | Electric | 16 | 20 | 5–10 |
| Oriental motor PKP223 | Electric | 28 | 110 | 1–5 |
| Present work | Thermal | 34 | 3.2 | ~10 |
| [1] | YOON, C. Advances in biomimetic stimuli responsive soft grippers. Nano Convergence, 6(1), 20 (2019) |
| [2] | SON, H. and YOON, C. Advances in stimuli-responsive soft robots with integrated hybrid materials. Actuators, 9(4), 115 (2020) |
| [3] | WANG, Z. B., CHEN, Y. X., MA, Y., and WANG, J. Bioinspired stimuli-responsive materials for soft actuators. Biomimetics, 9(3), 128 (2024) |
| [4] | LIU, K., WU, J. T., PAULINO, G. H., and QI, H. J. Programmable deployment of tensegrity structures by stimulus-responsive polymers. Scientific Reports, 7, 3511 (2017) |
| [5] | KIM, H., TORRES, F., WU, Y. Y., VILLAGRAN, D., LIN, Y. R., and TSENG, T. L. Integrated 3D printing and corona poling process of PVDF piezoelectric films for pressure sensor application. Smart Materials and Structures, 26(8), 085027 (2017) |
| [6] | CHEN, Z. P., LIN, Y. Y., ZHENG, G. Z., YANG, Y. W., ZHANG, Y. X., ZHENG, S. Q., LI, J. W., LI, J. W., REN, L., and JIANG, L. L. Programmable transformation and controllable locomotion of magnetoactive soft materials with 3D-patterned magnetization. ACS Applied Materials & Interfaces, 12, 58179–58190 (2020) |
| [7] | SHI, X. Y., DENG, Z. X., ZHANG, P., WANG, Y., ZHOU, G. F., and HAAN, L. T. Wearable optical sensing of strain and humidity: a patterned dual-responsive semi-interpenetrating network of a cholesteric main-chain polymer and a poly (ampholyte). Advanced Functional Materials, 31(45), 2104641 (2021) |
| [8] | TOKAREV, I. and MINKO, S. Preprogrammed dynamic microstructured polymer interfaces. Advanced Functional Materials, 30(2), 1903478 (2020) |
| [9] | XIA, X. X., SPADACCINI, C. M., and GREER, J. R. Responsive materials architected in space and time. Nature Reviews Materials, 7(9), 683–701 (2022) |
| [10] | CHE, K. K., ROULEAU, M., and MEAUD, J. Temperature-tunable time-dependent snapping of viscoelastic metastructures with snap-through instabilities. Extreme Mechanics Letters, 32, 100528 (2019) |
| [11] | HU, H. W., LI, D. Y., SALIM, T., LI, Y., CHENG, G. G., LAM, Y. M., and DING, J. N. Electrically driven hydrogel actuators: working principle, material design and applications. Journal of Materials Chemistry C, 12(5), 1565–1582 (2024) |
| [12] | EL HELOU, C., BUSKOHL, P. R., TABOR, C. E., and HARNE, R. L. Digital logic gates in soft, conductive mechanical metamaterials. Nature Communications, 12, 1633 (2021) |
| [13] | DONG, Q. Y., WAN, Z. Q., LI, Q., LIU, Y. S., ZHANG, P., ZHANG, X., NIU, Y. T., LIU, H., ZHOU, Y. S., and LV, L. W. 3D-printed near-infrared-light-responsive on-demand drug-delivery scaffold for bone regeneration. Biomaterials Advances, 159, 213804 (2024) |
| [14] | YUAN, Z. S., ZHA, J. Z., and LIU, J. X. A light-steered self-rowing liquid crystal elastomer-based boat. Polymers, 17(6), 711 (2025) |
| [15] | QIU, Y. L., DAI, Y. T., and LI, K. Multimodal self-operation of a liquid crystal elastomer spring-linkage mechanism under constant light. International Journal of Solids and Structures, 302, 112998 (2024) |
| [16] | LI, K., QIAN, P. P., HU, H. Y., DAI, Y. T., and GE, D. L. A light-powered liquid crystal elastomer semi-rotary motor. International Journal of Solids and Structures, 284, 112509 (2023) |
| [17] | DAI, L., XU, J. W., and XIAO, R. Modeling the stimulus-responsive behaviors of fiber-reinforced soft materials. International Journal of Applied Materials, 16, 2450041 (2024) |
| [18] | HU, Z. M., LI, Y. L., and LV, J. A. Phototunable self-oscillating system driven by a self-winding fiber actuator. Nature Communications, 12, 3211 (2021) |
| [19] | WANG, Q. Y., PAN, C. F., ZHANG, Y. X., PENG, L. L., CHEN, Z. P., MAJIDI, C., and JIANG, L. L. Magnetoactive liquid-solid phase transitional matter. Matter, 6, 855–872 (2023) |
| [20] | SUN, Y. X., WANG, L., ZHU, Z. Q., LI, X. X., SUN, H., ZHAO, Y., PENG, C. H., LIU, J., ZHANG, S. W., and LI, M. J. A 3D-printed ferromagnetic liquid crystal elastomer with programmed dual-anisotropy and multi-responsiveness. Advanced Materials, 35, 2302824 (2023) |
| [21] | ZHAO, X. H., CHEN, X. Y., YUK, H., LIN, S. T., LIU, X. Y., and PARADA, G. Soft materials by design: unconventional polymer networks give extreme properties. Chemical Reviews, 121, 4309–4372 (2021) |
| [22] | SUO, Z. G. Theory of dielectric elastomers. Acta Mechanica Solida Sinica, 23(6), 549–578 (2010) |
| [23] | YAO, B. W., WU, S. W., WANG, R. X., YAN, Y. C., CARDENAS, A., WU, D., ALSAID, Y., WU, W. Z., ZHU, X. Y., and HE, X. M. Hydrogel ionotronics with ultra-low impedance and high signal fidelity across broad frequency and temperature ranges. Advanced Functional Materials, 32(10), 2109506 (2022) |
| [24] | WANG, Y. M., WANG, Y. N., WEI, Q. H., and ZHANG, J. Light-responsive shape memory polymer composites. European Polymer Journal, 173, 111314 (2022) |
| [25] | ZHAO, W., LI, N., LIU, L. W., LENG, J. S., and LIU, Y. J. Mechanical behaviors and applications of shape memory polymer and its composites. Applied Physics Reviews, 10, 011306 (2023) |
| [26] | JIN, B. J. and YANG, S. Programming liquid crystalline elastomer networks with dynamic covalent bonds. Advanced Functional Materials, 33(45), 2304769 (2023) |
| [27] | HERBERT, K. M., FOWLER, H. E., MCCRACKEN, J. M., SCHLAFMANN, K. R., KOCH, J. A., and WHITE, T. J. Synthesis and alignment of liquid crystalline elastomers. Nature Reviews Materials, 7, 23–38 (2021) |
| [28] | HE, Q. G., WANG, Z. J., WANG, Y., WANG, Z. J., LI, C. H., ANNAPOORANAN, R., ZENG, J., CHEN, R. K., and CAI, S. Q. Electrospun liquid crystal elastomer microfiber actuator. Science Robotics, 6(57), eabi9704 (2021) |
| [29] | CAI, P. Q., WANG, C. X., GAO, H. J., and CHEN, X. D. Mechanomaterials: a rational deployment of forces and geometries in programming functional materials. Advanced Materials, 33(46), 2007977 (2021) |
| [30] | ZHOU, Y., HAUSER, A. W., BENDE, N. P., KUZYK, M. G., and HAYWARD, R. C. Waveguiding microactuators based on a photothermally responsive nanocomposite hydrogel. Advanced Functional Materials, 26(30), 5447–5452 (2016) |
| [31] | XU, S. M., ZHANG, S. S., LEI, R. C., LIU, Y., BU, W. S., WEI, X. L., and ZHANG, Z. Z. Fluid-driven and smart material-driven research for soft body robots. Progress in Natural Science: Materials International, 33(4), 371–385 (2023) |
| [32] | CHEN, S., WANG, H. Z., LIU, T. Y., and LIU, J. Liquid metal smart materials toward soft robotics. Advanced Intelligent Systems, 5(8), 2200375 (2023) |
| [33] | CHEN, Y. Z., KUENSTLER, A. S., HAYWARD, R. C., and JIN, L. H. Formation of rolls from liquid crystal elastomer bistrips. Soft Matter, 18(21), 4077–4089 (2022) |
| [34] | WANG, L., ZHENG, D., HARKER, P., PATEL, A. B., GUO, C. F., and ZHAO, X. H. Evolutionary design of magnetic soft continuum robots. Proceedings of the National Academy of Sciences of the United States of America, 118, e2021922118 (2021) |
| [35] | NARAYANAN, P., PRAMANIK, R., and AROCKIARAJAN, A. Micromechanics-based constitutive modeling of hard-magnetic soft materials. Mechanics of Materials, 184, 104722 (2023) |
| [36] | WANG, L., KIM, Y., GUO, C. F., and ZHAO, X. H. Hard-magnetic elastica. Journal of the Mechanics and Physics of Solids, 142, 104045 (2020) |
| [37] | YANG, H. X., ZHANG, C., CHEN, B. H., WANG, Z. J., XU, Y., and XIAO, R. Bioinspired design of stimuli-responsive artificial muscles with multiple actuation modes. Smart Materials and Structures, 32, 085023 (2023) |
| [38] | ZHANG, W., NAN, Y. F., WU, Z. X., SHEN, Y. J., and LUO, D. Photothermal-driven liquid crystal elastomers: materials, alignment and applications. Molecules, 27(14), 4330 (2022) |
| [39] | WHITE, T. J. and BROER, D. J. Programmable and adaptive mechanics with liquid crystal polymer networks and elastomers. Nature Materials, 14, 1087–1098 (2015) |
| [40] | WANG, L. Q., WEI, Z. X., XU, Z. T., YU, Q. M., WU, Z. L., WANG, Z. J., QIAN, J., and XIAO, R. Shape morphing of 3D printed liquid crystal elastomer structures with precuts. ACS Applied Polymer Materials, 5(9), 7477–7484 (2023) |
| [41] | ZHANG, Y., XUAN, C., JIANG, Y. F., and HUO, Y. Z. Continuum mechanical modeling of liquid crystal elastomers as dissipative ordered solids. Journal of the Mechanics and Physics of Solids, 126, 285–303 (2019) |
| [42] | KANG, J. T., LIU, S. X., and WANG, C. G. Controllable bistable smart composite structures driven by liquid crystal elastomer. Smart Materials and Structures, 31, 015003 (2022) |
| [43] | NIE, Z. Z., WANG, M., and YANG, H. Structure-induced intelligence of liquid crystal elastomers. Chemistry — A European Journal, 29(38), e202301027 (2023) |
| [44] | WANG, Z. J., WANG, Z. J., ZHENG, Y., HE, Q. G., WANG, Y., and CAI, S. Q. Three-dimensional printing of functionally graded liquid crystal elastomer. Science Advances, 6(39), e202301027 (2020) |
| [45] | WANG, J. K., ZHU, B. G., HUI, C. Y., and ZEHNDER, A. T. Determination of material parameters in constitutive models using adaptive neural network machine learning. Journal of the Mechanics and Physics of Solids, 177, 105324 (2023) |
| [46] | CLARKE, S. M., HOTTA, A., TAJBAKHSH, A. R., and TERENTJEV, E. M. Effect of crosslinker geometry on equilibrium thermal and mechanical properties of nematic elastomers. Physical Review E, 64(6), 061702 (2001) |
| [47] | NOLAN, D. R., LALLY, C., and MCGARRY, J. P. Understanding the deformation gradient in Abaqus and key guidelines for anisotropic hyperelastic user material subroutines (UMATs). Journal of the Mechanical Behavior of Biomedical Materials, 126, 104940 (2022) |
| [48] | GARANT, X. and GOSSELIN, C. Design and experimental validation of reorientation manoeuvres for a free falling robot inspired from the cat righting reflex. IEEE Transactions on Robotics, 37(2), 482–493 (2021) |
| [49] | SHEN, Y. K., GUO, Y., and FAN, J. W. Robot joint cycloidal gear tooth fault detection in robot working conditions based on piecewise mean difference. IEEE Sensors Journal, 24(20), 32740–32747 (2024) |
| [50] | ISHIGURO, Y., MAKABE, T., NAGAMATSU, Y., KOJIO, Y., KOJIMA, K., SUGAI, F., KAKIUCHI, Y., OKADA, K., and INABA, M. Bilateral humanoid teleoperation system using whole-body exoskeleton cockpit TABLIS. IEEE Robotics and Automation Letters, 5(4), 6419–6426 (2020) |
| [51] | XIONG, Q., LI, D. N., ZHOU, X. Y., XIN, W. C., WANG, C., AMBROSE, J. W., and YEOW, R. C. Single-motor ultraflexible robotic (SMUFR) humanoid hand. IEEE Transactions on Medical Robotics and Bionics, 6(4), 1666–1677 (2024) |
| [52] | ZONG, H. Z., YANG, Z. X., YU, X., ZHANG, J. H., AI, J. K., ZHU, Q. X., WANG, F., SU, Q., and XU, B. Active disturbance rejection control of hydraulic quadruped robots rotary joints for improved impact resistance. Chinese Journal of Mechanical Engineering, 37, 103 (2024) |
| [53] | YANG, M. X., ZHANG, X., SHI, Y. D., and WANG, X. S. Mechanical design and position-tracking control of a novel robotic joint with a circular rotary electro-hydraulic actuator. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 237, 3680–3691 (2023) |
| [54] | DAI, L., WANG, L. Q., CHEN, B. H., XU, Z. T., WANG, Z. J., and XIAO, R. Shape memory behaviors of 3D printed liquid crystal elastomers. Soft Science, 3, 5 (2023) |
| [1] | Xueru WANG, Pengxin WANG, Junjie CHEN, Chuanyang HUANG, Kai LI. Light-powered self-propelling boat via self-rotating liquid crystal elastomer rod [J]. Applied Mathematics and Mechanics (English Edition), 2026, 47(5): 1065-1084. |
| [2] | Kai LI, Chongfeng ZHAO, Yunlong QIU, Yuntong DAI. Light-powered self-rolling of a liquid crystal elastomer-based dicycle [J]. Applied Mathematics and Mechanics (English Edition), 2025, 46(2): 253-268. |
| [3] | Yun CUI, Yafei YIN, Chengjun WANG, K. SIM, Yuhang LI, Cunjiang YU, Jizhou SONG. Transient thermo-mechanical analysis for bimorph soft robot based on thermally responsive liquid crystal elastomers [J]. Applied Mathematics and Mechanics (English Edition), 2019, 40(7): 943-952. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||





 Email Alert
Email Alert RSS
RSS