Applied Mathematics and Mechanics (English Edition) ›› 2024, Vol. 45 ›› Issue (5): 795-818.doi: https://doi.org/10.1007/s10483-024-3081-8
• Articles • Previous Articles Next Articles
R. FAZEL1, A. M. SHAFEI1,*( ), S. R. NEKOO2
), S. R. NEKOO2
Received:2023-10-01
Online:2024-05-03
Published:2024-04-26
Contact:
A. M. SHAFEI, E-mail: shafei@uk.ac.ir2010 MSC Number:
R. FAZEL, A. M. SHAFEI, S. R. NEKOO. Kinematic analysis of flexible bipedal robotic systems. Applied Mathematics and Mechanics (English Edition), 2024, 45(5): 795-818.
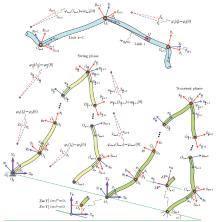
Fig. 1
Configurations of bipedal robot consisting of n elastic links in swing and transient phases (color online)"
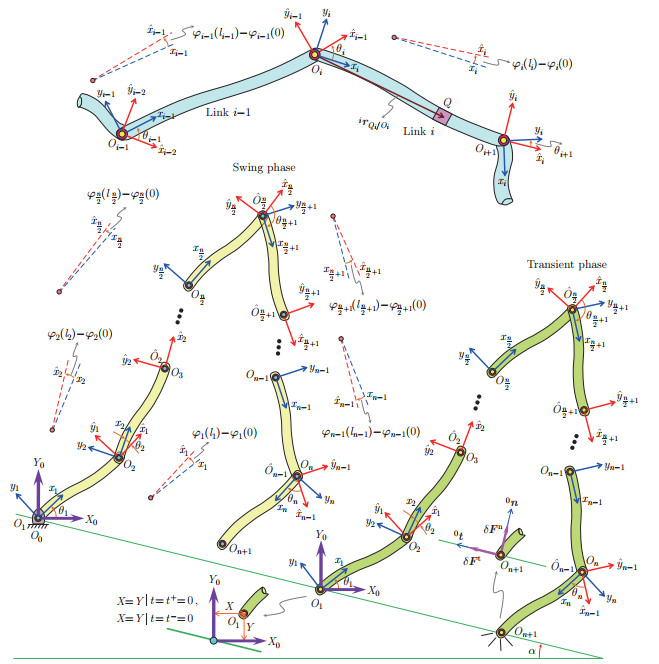
Fig. 2
Relationship between generalized coordinates at end of previous step and beginning of new step (color online)"
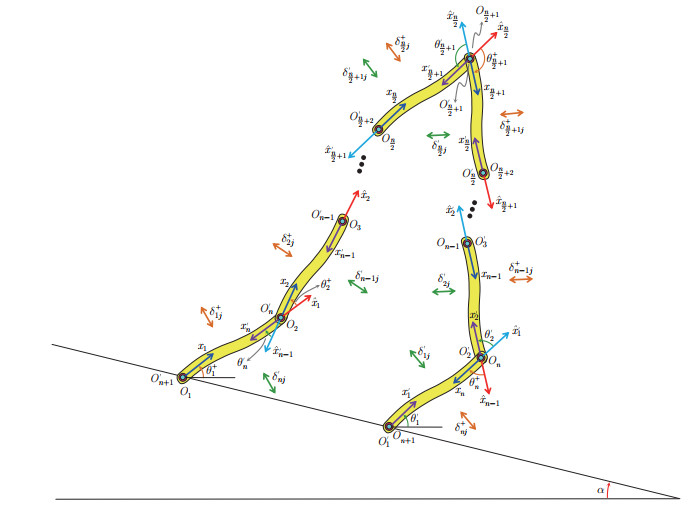
Table 1
Relationship between generalized coordinates at end of one step and start of another"
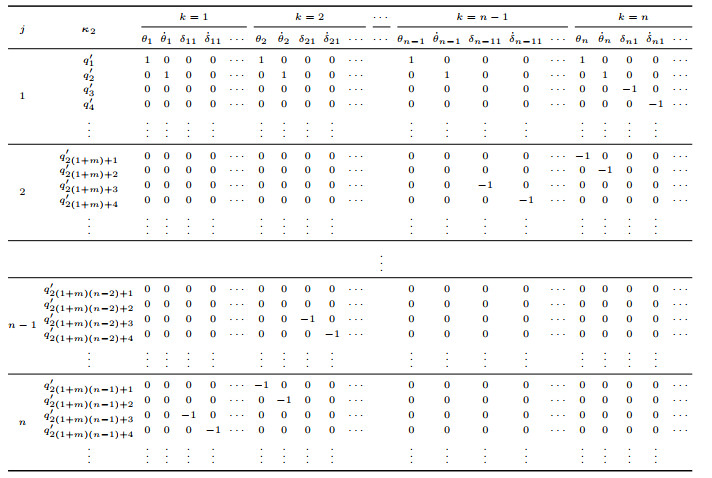 |
Table 2
Physical and geometrical specifications of elastic bipedal robot"
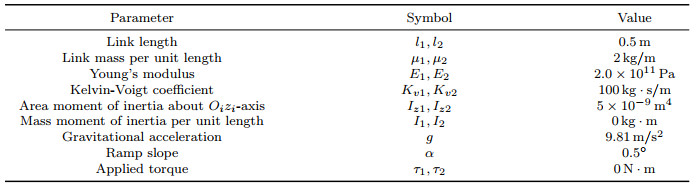 |
Fig. 3
Angular positions of bipedal robot's joints (color online)"
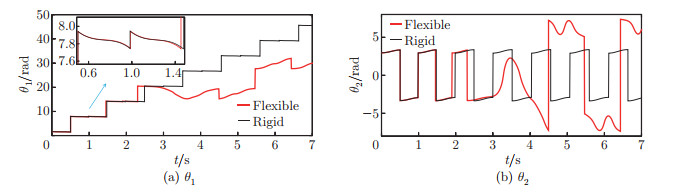
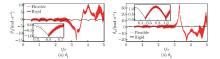
Fig. 4
Angular velocities of bipedal robot's joints (color online)"
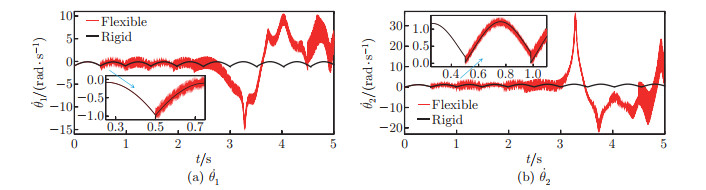

Fig. 5
Generalized modal coordinates (color online)"
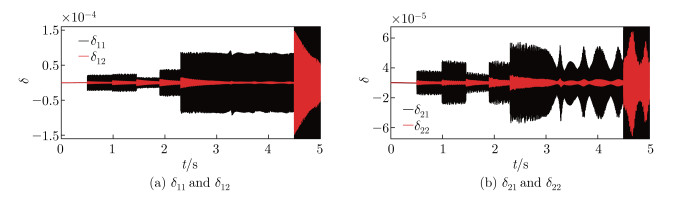

Fig. 6
Generalized modal velocities (color online)"
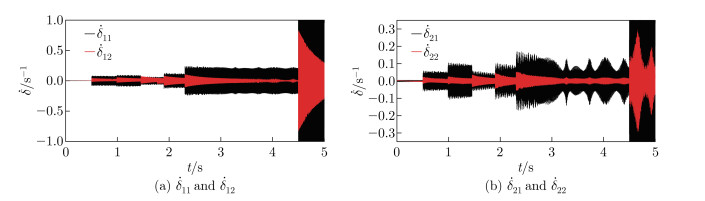

Fig. 7
Energy variations of bipedal robot with (a) rigid and (b) elastic links, where "PE" denotes potential energy, "KE" denotes kinetic energy, "ME" denotes mechanical energy, and "SPE" denotes strain potential energy (color online)"
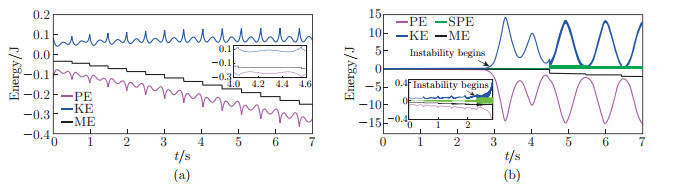

Fig. 8
Phase plane diagrams for bipedal robot with (a) rigid and (b) elastic links (color online)"
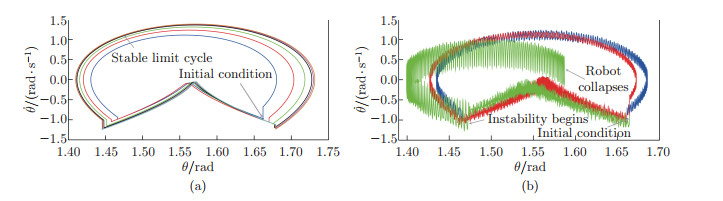

Fig. 9
(a) Angular positions and (b) angular velocities of first robot joint for two different Kelvin-Voigt coefficients (color online)"
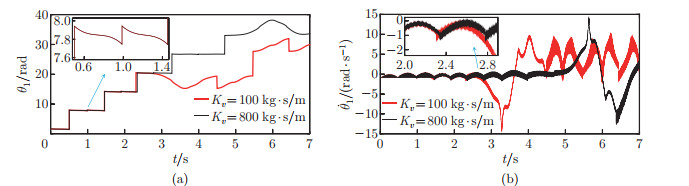

Fig. 10
(a) Generalized modal coordinates and (b) generalized modal velocities for first mode shape of first link (color online)"
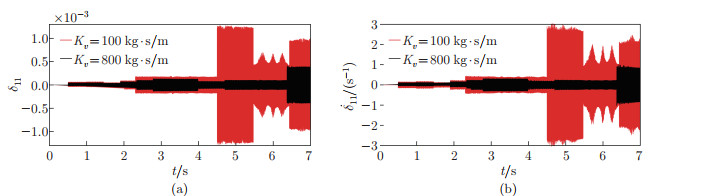

Fig. 11
Phase plane diagrams for bipedal robot with flexible links for two different Kelvin-Voigt coefficients (color online)"
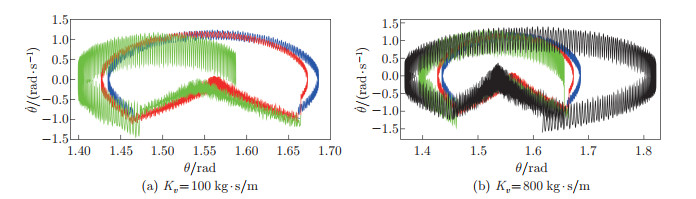

Fig. 12
(a) Angular positions and (b) angular velocities of second robot joint for two different Young's modulus values (color online)"
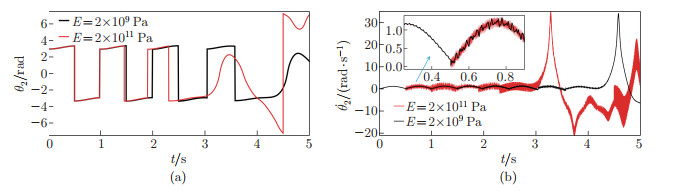
Fig. 13
(a) Generalized modal coordinates and (b) generalized modal velocities for first mode shape of second link (color online)"
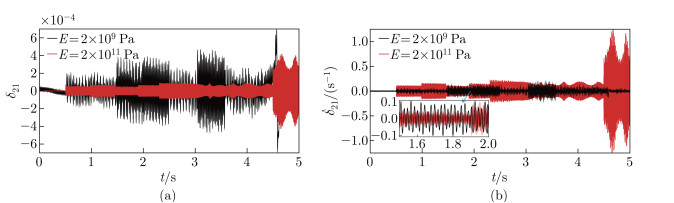

Fig. 14
Phase plane diagrams for bipedal robot with elastic links at two different moduli of elasticity (color online)"
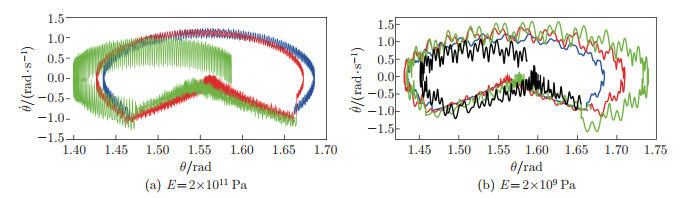
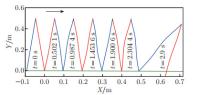
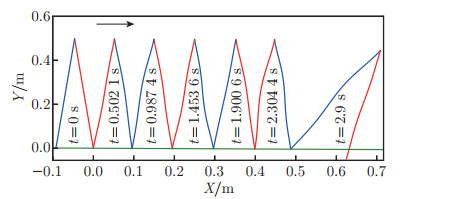
Fig. 15
Configurations of flexible-link bipedal robot as it walks down ramp inclined at α=0.5° (color online)"
| 1 | KERIMOǦLU, D., MORGÜL, Ö., and SARANLI, U. Stability and control of planar compass gait walking with series-elastic ankle actuation. Transactions of the Institute of Measurement and Control, 39, 312- 323 (2017) |
| 2 | ⅡDA, F., MINEKAWA, Y., RUMMEL, J., and SEYFARTH, A. Toward a human-like biped robot with compliant legs. Robotics and Autonomous Systems, 57, 139- 144 (2009) |
| 3 | ZELIK, K. E., HUANG, T. W. P., ADAMCZYK, P. G., and KUO, A. D. The role of series ankle elasticity in bipedal walking. Journal of Theoretical Biology, 346, 75- 85 (2014) |
| 4 | DENG, K., ZHAO, M., and XU, W. Level-ground walking for a bipedal robot with a torso via hip series elastic actuators and its gait bifurcation control. Robotics and Autonomous Systems, 79, 58- 71 (2016) |
| 5 | WU, Y., YAO, D., and XIAO, X. The effects of ground compliance on flexible planar passive biped dynamic walking. Journal of Mechanical Science and Technology, 32, 1793- 1804 (2018) |
| 6 | FATHIZADEH, M., MOHAMMADI, H., and TAGHVAEI, S. A modified passive walking biped model with two feasible switching patterns of motion to resemble multi-pattern human walking. Chaos, Solitons & Fractals, 127, 83- 95 (2019) |
| 7 | SHAFEI, A. M., and SHAFEI, H. R. Considering link flexibility in the dynamic synthesis of closed-loop mechanisms: a general approach. Journal of Vibration and Acoustics, 142, 021004 (2020) |
| 8 | CHEN, B., HUANG, J., and JI, J. C. Control of flexible single-link manipulators having Duffing oscillator dynamics. Mechanical Systems and Signal Processing, 121, 44- 57 (2019) |
| 9 | KORAYEM, M. H., SHAFEI, A. M., DOOSTHOSEINI, M., ABSALAN, F., and KADKHODAEI, B. Theoretical and experimental investigation of viscoelastic serial robotic manipulators with motors at the joints using Timoshenko beam theory and Gibbs-Appell formulation. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 230, 37- 51 (2016) |
| 10 | QIU, Z., LI, C., and ZHANG, X. Experimental study on active vibration control for a kind of two-link flexible manipulator. Mechanical Systems and Signal Processing, 11, 623- 644 (2019) |
| 11 | KORAYEM, M. H., SHAFEI, A. M., ABSALAN, F., KADKHODAEI, B., and AZIMI, A. Kinematic and dynamic modeling of viscoelastic robotic manipulators using Timoshenko beam theory: theory and experiment. The International Journal of Advanced Manufacturing Technology, 71, 1005- 1018 (2014) |
| 12 | SHANG, D., LI, X., YIN, M., and LI, F. Dynamic modeling and fuzzy compensation sliding mode control for flexible manipulator servo system. Applied Mathematical Modelling, 107, 530- 556 (2022) |
| 13 | KORAYEM, M. H., and SHAFEI, A. M. A new approach for dynamic modeling of n-viscoelastic-link robotic manipulators mounted on a mobile base. Nonlinear Dynamics, 79, 2767- 2786 (2015) |
| 14 | SHAFEI, H. R., BAHRAMI, M., and TALEBI, H. A. Design of adaptive optimal robust control for two-flexible-link manipulators in the presence of matched uncertainties. Journal of Vibration and Control, 27, 612- 628 (2020) |
| 15 | SHEN, Y., and KUANG, Y. Transient contact-impact behavior for passive walking of compliant bipedal robots. Extreme Mechanics Letters, 42, 101076 (2021) |
| 16 | SAFARTOOBI, M., DARDEL, M., and MOHAMMADI-DANIALI, H. Passive walking biped robot model with flexible viscoelastic legs. Nonlinear Dynamics, 109, 2615- 2636 (2022) |
| 17 | JIN, C., and SANKAR, T. S. A systematic method of dynamics for flexible robot manipulators. Journal of Robotic System, 9, 861- 891 (1992) |
| 18 | TANG, L. W., GOUTTEFARDE, M., SUN, H. N., YIN, L. R., and ZHOU, C. J. Dynamic modelling and vibration suppression of a single-link flexible manipulator with two cables. Mechanism and Machine Theory, 162, 104347 (2021) |
| 19 | WEI, J., CAO, D., LIU, L., and HUANG, W. Global mode method for dynamic modeling of a flexible-link flexible-joint manipulator with tip mass. Applied Mathematical Modelling, 48, 787- 805 (2017) |
| 20 | KHALIL, W., BOYER, F., and MORSLI, F. General dynamic algorithm for floating base tree structure robots with flexible joints and links. ASME Journal of Mechanisms and Robotics, 9, 031003 (2017) |
| 21 | MATA, V., PROVENZANO, S., CUADRADO, J. I., and VALERO, F. Serial-robot dynamics algorithms for moderately large number large number of joints. Mechanism and Machine Theory, 37, 739- 755 (2002) |
| 22 | SHAFEI, A. M., and KORAYEM, M. H. Theoretical and experimental study of dynamic load-carrying capacity for flexible robotic arms in point-to-point motion. Optimal Control Applications and Methods, 38, 963- 972 (2017) |
| 23 | REZAEI, V., and SHAFEI, A. M. Dynamic analysis of flexible robotic manipulators constructed of functionally graded materials. Iranian Journal of Science and Technology, Transactions of Mechanical Engineering, 43, 327- 342 (2019) |
| 24 | SHAFEI, A. M., and RIAHI, M. M. The effects of mode shapes on the temporal response of flexible closed-loop linkages under the impulse excitation. Mechanical Systems and Signal Processing, 178, 109256 (2022) |
| 25 | KORAYEM, M. H., and SHAFEI, A. M. Motion equations proper for forward dynamics of robotic manipulator with flexible links by using recursive Gibbs-Appell formulation. Scientia Iranica Transaction B-Mechanical Engineering, 16, 479- 495 (2009) |
| 26 | SHAFEI, A. M., and SHAFEI, H. R. Oblique impact of multi-flexible-link systems. Journal of Vibration and Control, 24, 904- 923 (2018) |
| 27 | SHAFEI, A. M., and MIRZAEINEJAD, H. A novel recursive formulation for dynamic modeling and trajectory tracking control of multi-rigid-link robotic manipulators mounted on a mobile platform. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 235, 1204- 1217 (2021) |
| 28 | SHAFEI, A. M., and MIRZAEINEJAD, H. A general formulation for managing trajectory tracking in non-holonomic moving manipulators with rotary-sliding joints. Journal of Intelligent & Robotic Systems, 99, 729- 746 (2020) |
| 29 | KORAYEM, M. H., SHAFEI, A. M., and SEIDI, E. Symbolic derivation of governing equations for dual-arm mobile manipulators used in fruit-picking and the pruning of tall trees. Computers and Electronics in Agriculture, 105, 95- 102 (2014) |
| 30 | MIRZAEINEJAD, H., and SHAFEI, A. M. Modeling and trajectory tracking control of a two-wheeled mobile robot: Gibbs-Appell and prediction-based approaches. Robotica, 36, 1551- 1570 (2018) |
| 31 | SHAFEI, H. R., and BAHRAMI, M. Trajectory tracking control of a wheeled mobile robot in the presence of matched uncertainties via a composite control approach. Asian Journal of Control, 23, 2805- 2823 (2021) |
| 32 | SHAFEI, A. M., and SHAFEI, H. R. Dynamic behavior of flexible multiple links captured inside a closed space. Journal of Computational and Nonlinear Dynamics, 11, 051016 (2016) |
| 33 | SHAFEI, A. M., and SHAFEI, H. R. Dynamic modeling of tree-type robotic systems by combining 3×3 rotation and 4×4 transformation matrices. Multibody System Dynamics, 44, 367- 395 (2018) |
| 34 | SHAFEI, A. M., and SHAFEI, H. R. Planar multibranch open-loop robotic manipulators subjected to ground collision. Journal of Computational and Nonlinear Dynamics, 12, 061003 (2017) |
| 35 | ZAHEDI, A., SHAFEI, A. M., and SHAMSI, M. Application of hybrid robotic systems in crop harvesting: kinematic and dynamic analysis. Computers and Electronics in Agriculture, 209, 107724 (2023) |
| 36 | ZAHEDI, A., SHAFEI, A. M., and SHAMSI, M. Kinetics of planar constrained robotic mechanisms with multiple closed loops: an experimental study. Mechanism and Machine Theory, 183, 105250 (2023) |
| 37 | ZAHEDI, A., SHAFEI, A. M., and SHAMSI, M. On the dynamics of multi-closed-chain robotic mechanisms. International Journal of Non-Linear Mechanics, 147, 104241 (2022) |
| 38 | SHAFEI, A. M., and SADEGHI, Z. The kinematics and kinetics of multi-closed-chain mechanisms in the impact and non-impact stages. Meccanica, 57, 2591- 2608 (2022) |
| 39 | VALLEJOS, P., RUIZ-DEL-SOLAR, J., and SWETT, F. A new methodology for the design of passive biped robots: determining conditions on the robot's parameters for the existence of stable walking cycles. Journal of Intelligent & Robotic Systems, 63, 503- 523 (2011) |
| 40 | OBAYASHI, I., AOI, S., TSUCHIYA, K., and KOKUBU, H. Common formation mechanism of basin of attraction for bipedal walking models by saddle hyperbolicity and hybrid dynamics. Japan Journal of Industrial and Applied Mathematics, 32, 315- 332 (2015) |
| 41 | GRITLI, H., KHRAEIF, N., and BELGHITH, S. Period-three route to chaos induced by a cyclic-fold bifurcation in passive dynamic walking of a compass-gait biped robot. Communications in Nonlinear Science and Numerical Simulation, 17, 4356- 4372 (2012) |
| 42 | DARDEL, M., SAFARTOOBI, M., PASHAEI, M. H., GHASEMI, M. H., and KAZEMI NAVAEI, M. Finite difference method to find period-one gait cycles of simple passive walkers. Communications in Nonlinear Science and Numerical Simulation, 20, 79- 97 (2015) |
| 43 | KORAYEM, M. H., and SHAFEI, A. M. Application of recursive Gibbs-Appell formulation in deriving the equations of motion of N-viscoelastic robotic manipulators in 3D space using Timoshenko beam theory. Acta Astronautica, 83, 273- 294 (2013) |
| 44 | AHMADIZADEH, M., SHAFEI, A. M., and JAFARI, R. Frictional impact-contacts in multiple flexible links. International Journal of Structural Stability and Dynamics, 21, 2150075 (2021) |
| 45 | KORAYEM, M. H., and SHAFEI, A. M. Motion equation of nonholonomic wheeled mobile robotic manipulator with revolute-prismatic joints using recursive Gibbs-Appell formulation. Applied Mathematical Modelling, 39, 1701- 1716 (2015) |
| 46 | AHMADIZADEH, M., SHAFEI, A. M., and FOOLADI, M. Dynamic modeling of closed-chain robotic manipulators in the presence of frictional dynamic forces: a planar case. Mechanics Based Design of Structures and Machines, 51, 4347- 4367 (2023) |
| 47 |
DU, X., CHEN, Y., ZHANG, J., GUO, X., LI, L., and ZHANG, D. Nonlinear coupling modeling and dynamics analysis of rotating flexible beams with stretching deformation effect. Applied Mathematics and Mechanics (English Edition), 44 (1), 125- 140 (2023)
doi: 10.1007/s10483-023-2951-9 |
| 48 |
CHEN, W., WANG, G., LI, Y., WANG, L., and YIN, Z. The quaternion beam model for hard-magnetic flexible cantilevers. Applied Mathematics and Mechanics (English Edition), 44 (5), 787- 808 (2023)
doi: 10.1007/s10483-023-2983-8 |
| 49 | AHMADIZADEH, M., SHAFEI, A. M., and FOOLADI, M. Dynamic analysis of multiple inclined and frictional impact-contacts in multi-branch robotic systems. Applied Mathematical Modelling, 91, 24- 42 (2021) |
| 50 |
MEI, Z., and WANG, Z. Multiplicity-induced optimal gains of an inverted multiplicity-induced optimal gains of an inverted pendulum system under a delayed proportional-derivative-acceleration feedback. Applied Mathematics and Mechanics (English Edition), 43 (11), 1747- 1762 (2022)
doi: 10.1007/s10483-022-2921-8 |
| [1] | Ying TAN, Weidong SU. A trigonometric series expansion method for the Orr-Sommerfeld equation [J]. Applied Mathematics and Mechanics (English Edition), 2019, 40(6): 877-888. |
| [2] | Zhijie SHI, Yuesheng WANG, Chuanzeng ZHANG. Band structure calculations of in-plane waves in two-dimensional phononic crystals based on generalized multipole technique [J]. Applied Mathematics and Mechanics (English Edition), 2015, 36(5): 557-580. |
| [3] | Jun GAO;Ji-sheng LUO. Mode decomposition of nonlinear eigenvalue problems and application in flow stability [J]. Applied Mathematics and Mechanics (English Edition), 2014, 35(6): 667-674. |
| [4] | SHI Zhi-Jie;WANG Yue-Sheng;ZHANG Chuan-Zeng. Band structure calculation of scalar waves in two-dimensional phononic crystals based on generalized multipole technique [J]. Applied Mathematics and Mechanics (English Edition), 2013, 34(9): 1123-1144. |
| [5] | Peng-zhan HUANG;Yin-nian HE;Xin-longFENG. Two-level stabilized finite element method for Stokes eigenvalue problem [J]. Applied Mathematics and Mechanics (English Edition), 2012, 33(5): 621-630. |
| [6] | A. K. VASHISHTH;V. GUPTA. Uniqueness theorem, theorem of reciprocity, and eigenvalue problems in linear theory of porous piezoelectricity [J]. Applied Mathematics and Mechanics (English Edition), 2011, 32(4): 479-494. |
| [7] | CHEN Bo;LI Xiao-Wei;LIU Gao-Lian. Constraint-induced restriction and extension operators with applications [J]. Applied Mathematics and Mechanics (English Edition), 2009, 30(11): 1345-1352. |
| [8] | Li Shu;Zhuo Jiashou;Ren Qingwen . PARAMETER IDENTIFICATION OF DYNAMIC MODELS USING A BAYES APPROACH [J]. Applied Mathematics and Mechanics (English Edition), 2000, 21(4): 447-454. |
| [9] | Zhong Wanxie;Xu Xinsheng;Zhang Hongwu. HAMILTONIAN SYSTEM AND THE SAINT VENANT PROBLEM IN ELASTICITY [J]. Applied Mathematics and Mechanics (English Edition), 1996, 17(9): 827-836. |
| [10] | Song Jinbao;Chen Jianning. THE CALCULATION OF EIGENVALUES FOR THE STATIONARYPERTURBATION OF COUETTE-POlSEUILLE FLOW [J]. Applied Mathematics and Mechanics (English Edition), 1995, 16(10): 985-994. |
| [11] | Ma Ruyun;Ma Qinsheng. MULTIPLICITY RESULTS FOR A FOURTH-ORDER BOUNDARY VALUE PROBLEM [J]. Applied Mathematics and Mechanics (English Edition), 1995, 16(10): 961-969. |
| [12] | Xie Han-guang . DEFORMATION OF STRUCTURE AND SPECTRUM OF EVOLUTION EQUATIONS [J]. Applied Mathematics and Mechanics (English Edition), 1991, 12(8): 807-811. |
| [13] | Lü Zhen-hua;Feng Zhen-dong;Fang Chuan-liu. A NEW MATRIX PERTURBATION METHOD FOR ANALYTICAL SOLUTION OF THE COMPLEX MODAL EIGENVALUE PROBLEM OF VISCOUSLY DAMPED LINEAR VIBRATION SYSTEMS [J]. Applied Mathematics and Mechanics (English Edition), 1991, 12(8): 767-776. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||





 Email Alert
Email Alert RSS
RSS