Applied Mathematics and Mechanics (English Edition) ›› 2025, Vol. 46 ›› Issue (3): 555-572.doi: https://doi.org/10.1007/s10483-025-3232-7
Previous Articles Next Articles
J. TAYEBI1, Yingjie CHEN1, Ti CHEN1,†( ), Shiyuan JIA2
), Shiyuan JIA2
Received:2024-10-13
Revised:2024-12-22
Published:2025-03-03
Contact:
Ti CHEN, E-mail: chenti@nuaa.edu.cnSupported by:2010 MSC Number:
J. TAYEBI, Yingjie CHEN, Ti CHEN, Shiyuan JIA. Attitude control of flexible satellite via three-dimensional magnetically suspended wheel. Applied Mathematics and Mechanics (English Edition), 2025, 46(3): 555-572.
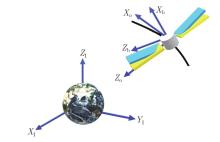
Fig. 1
Earth-centered inertial frame, orbit frame, and body frame of the flexible satellite (color online)"
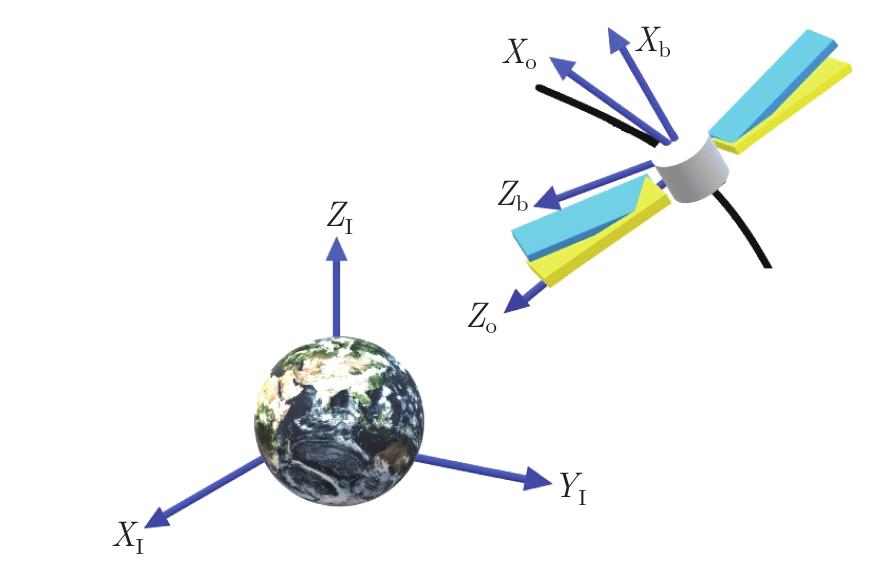
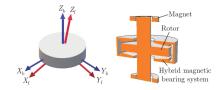
Fig. 2
The schematic and reference coordinates of the 3D MSW (color online)"
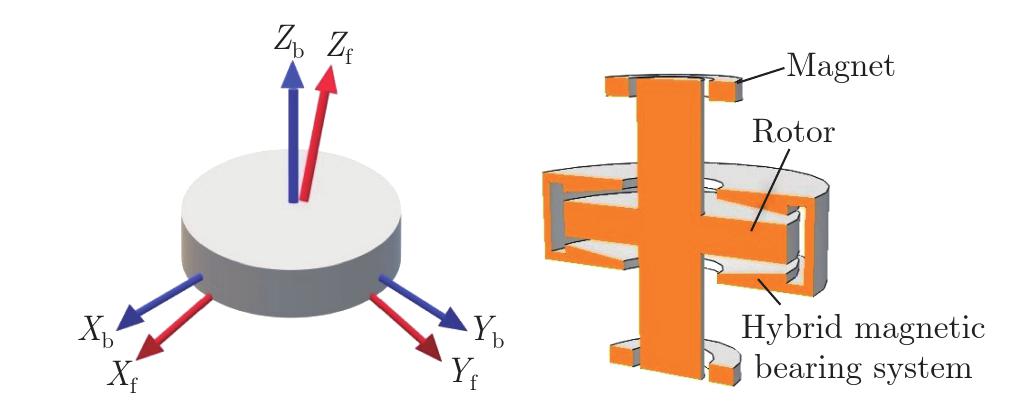

Fig. 3
The block diagram of the adaptive variable structure control based on a fuzzy disturbance observer (color online)"
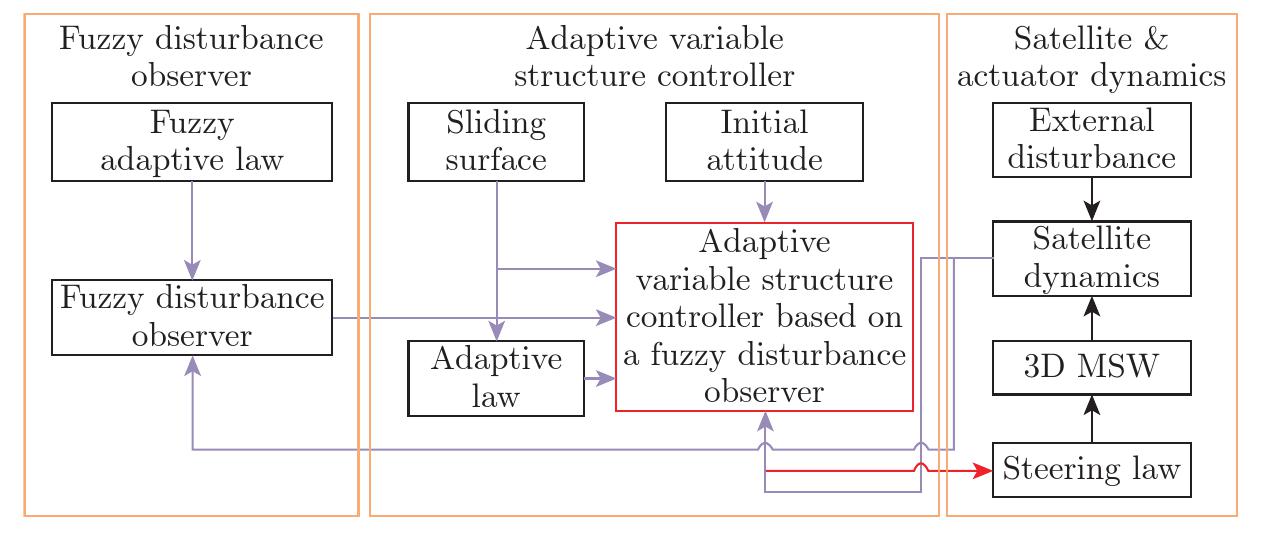
Table 1
Simulation parameters of the system"
| Parameter | Value | Unit |
|---|---|---|
| 0.052 | rad | |
| 5 000 | r/min | |
| 2.166 | rad/s2 | |
| 4 500 | rad | |
| 0.097 7 | ||
| (0 0 0) | rad | |
| (0 0 0) | rad | |
| 1.2 | ||
| 50 | ||
| 0.01 | ||
| Disturbance torque |
Fig. 4
The Euler angles and the angular velocity of the satellite (color online)"
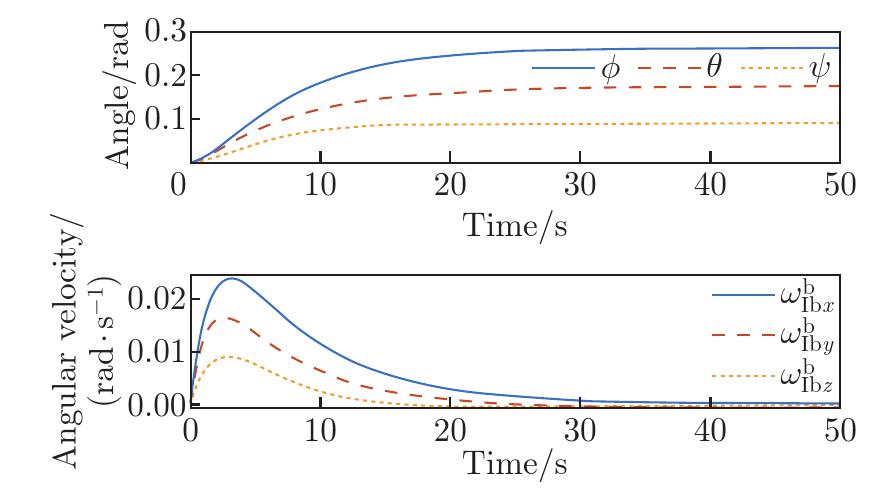
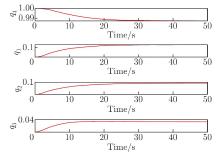
Fig. 5
Attitude quaternion of satellite (color online)"
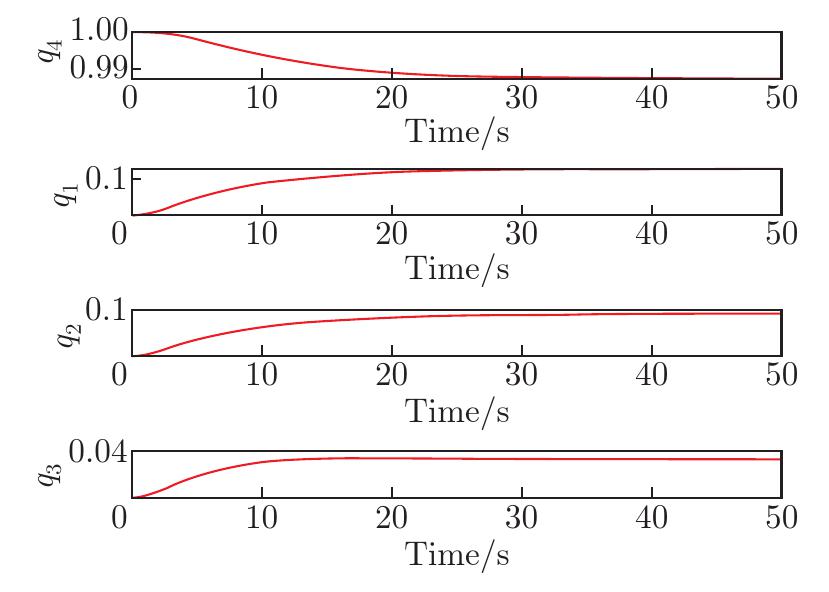
Fig. 6
Attitude quaternion errors (color online)"
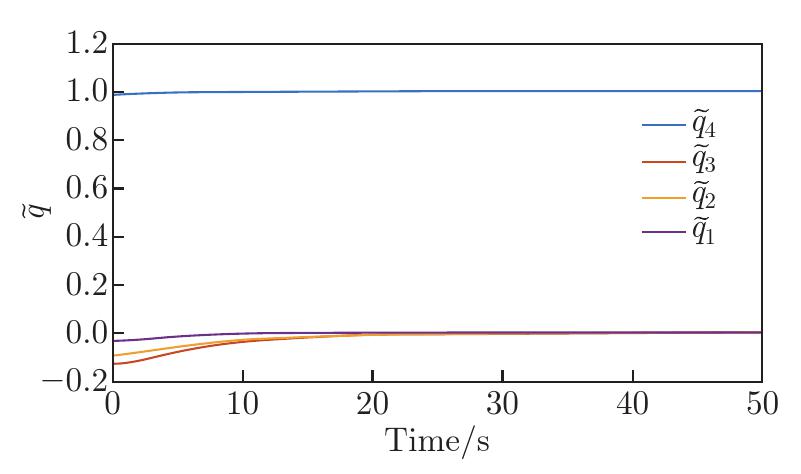

Fig. 7
The tilt angles of the 3D MSW arrangement during the sample scenario (color online)"
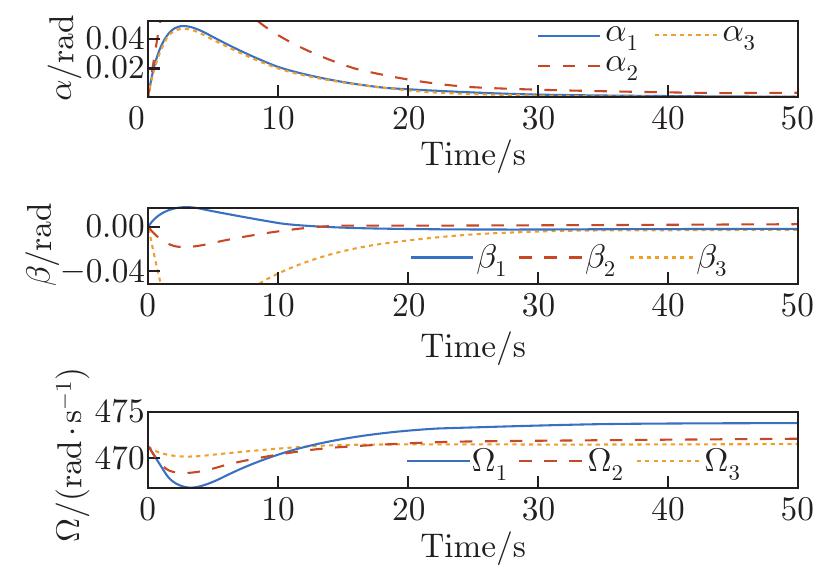
Fig. 8
The produced torque by the 3D MSW configuration, and the modal vector (color online)"
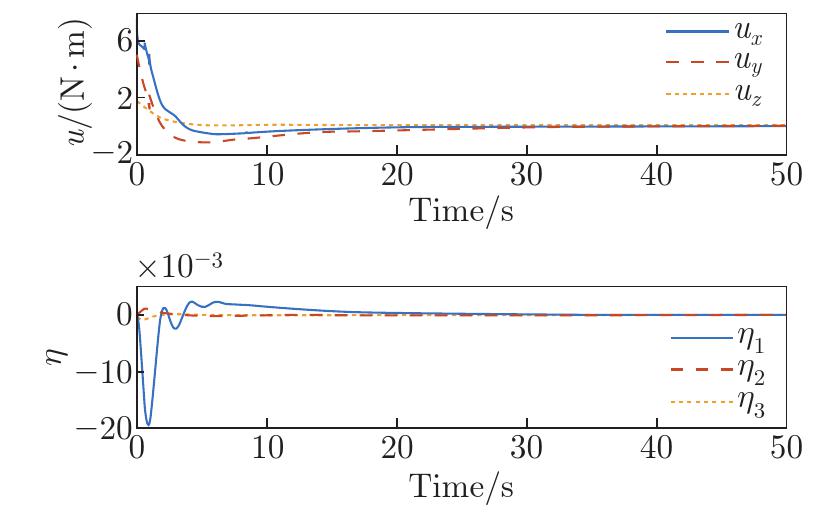
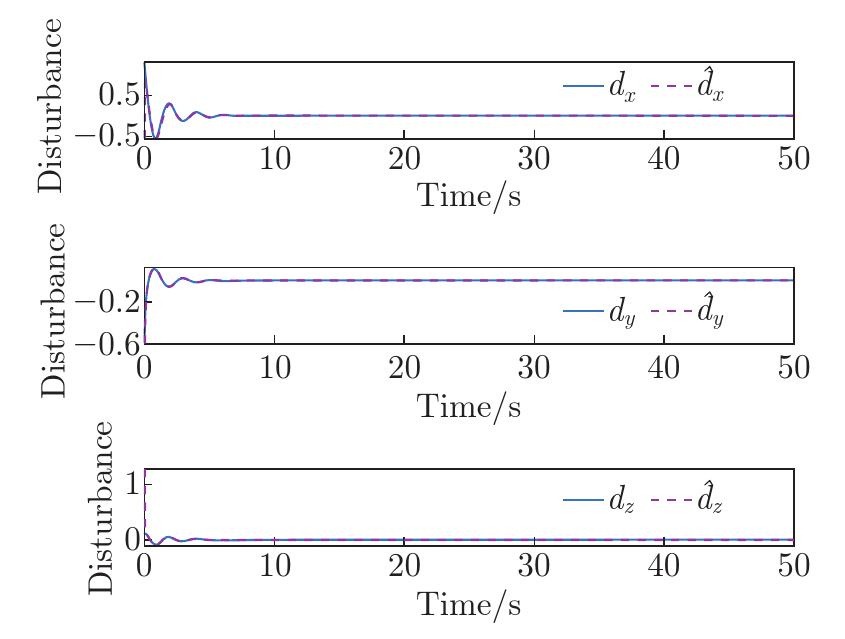
Fig. 9
The disturbance estimation (color online)"
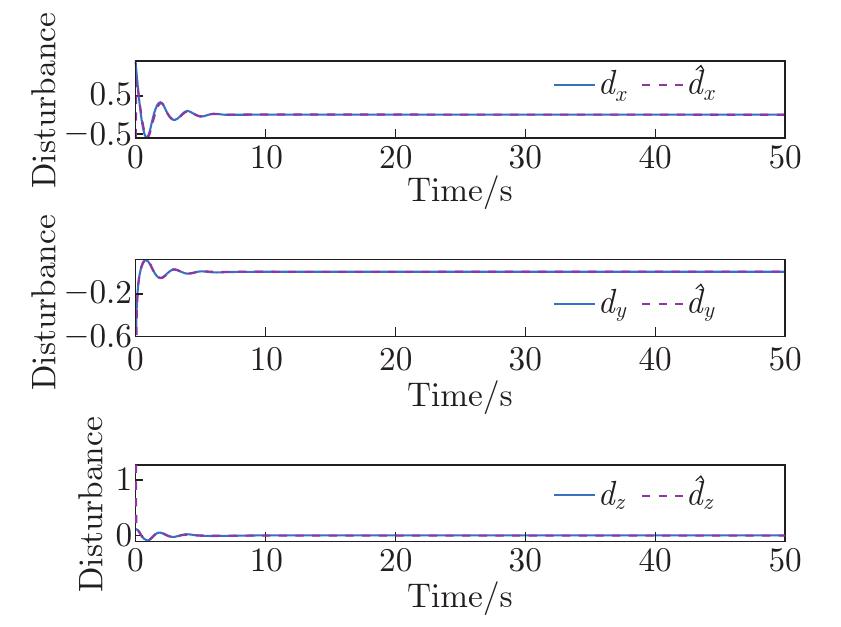
Fig. 10
The Euler angles and the angular velocity of the satellite during single actuator failure scenario (color online)"
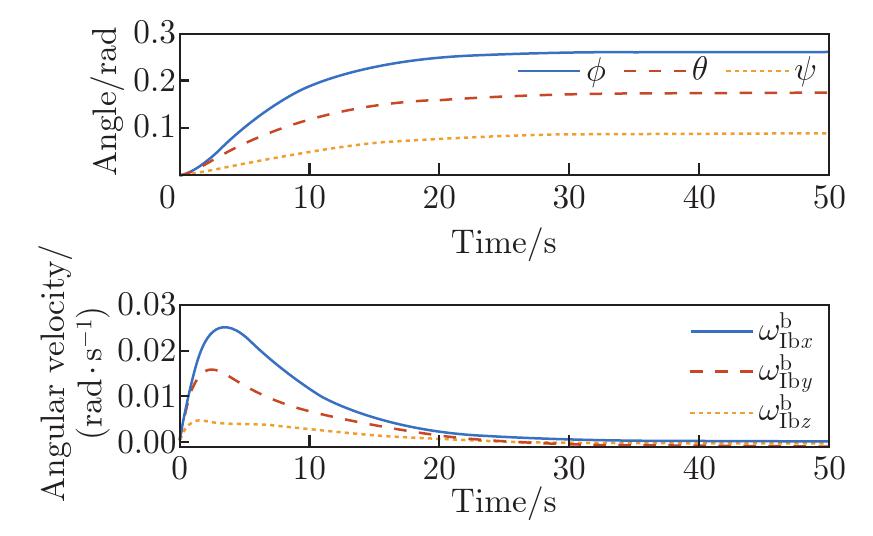
Fig. 11
Attitude quaternion of satellite during single actuator failure scenario (color online)"
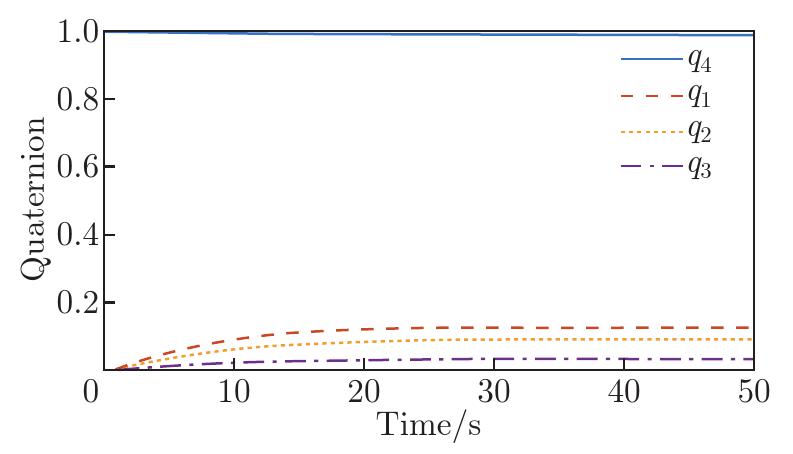
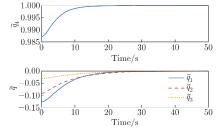
Fig. 12
Attitude quaternion errors during single actuator failure scenario (color online)"
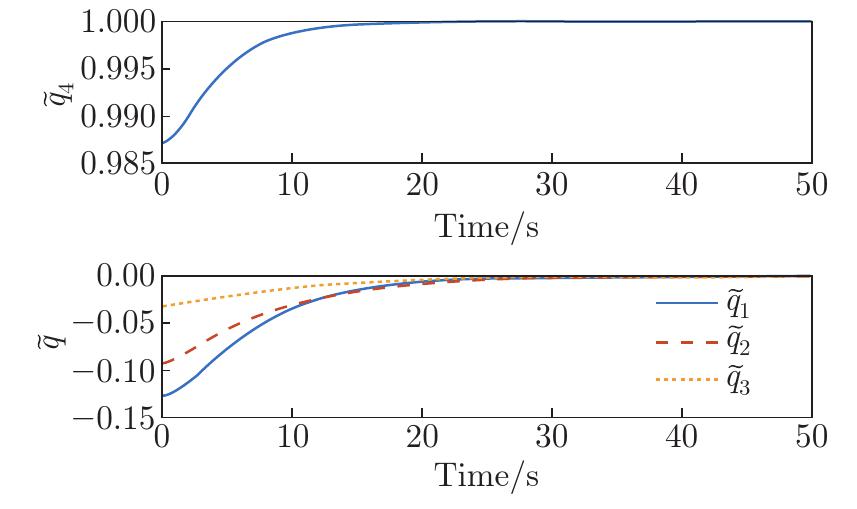
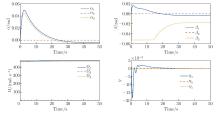
Fig. 13
The tilt angles and the modal vector diagrams during single actuator failure scenario (color online)"
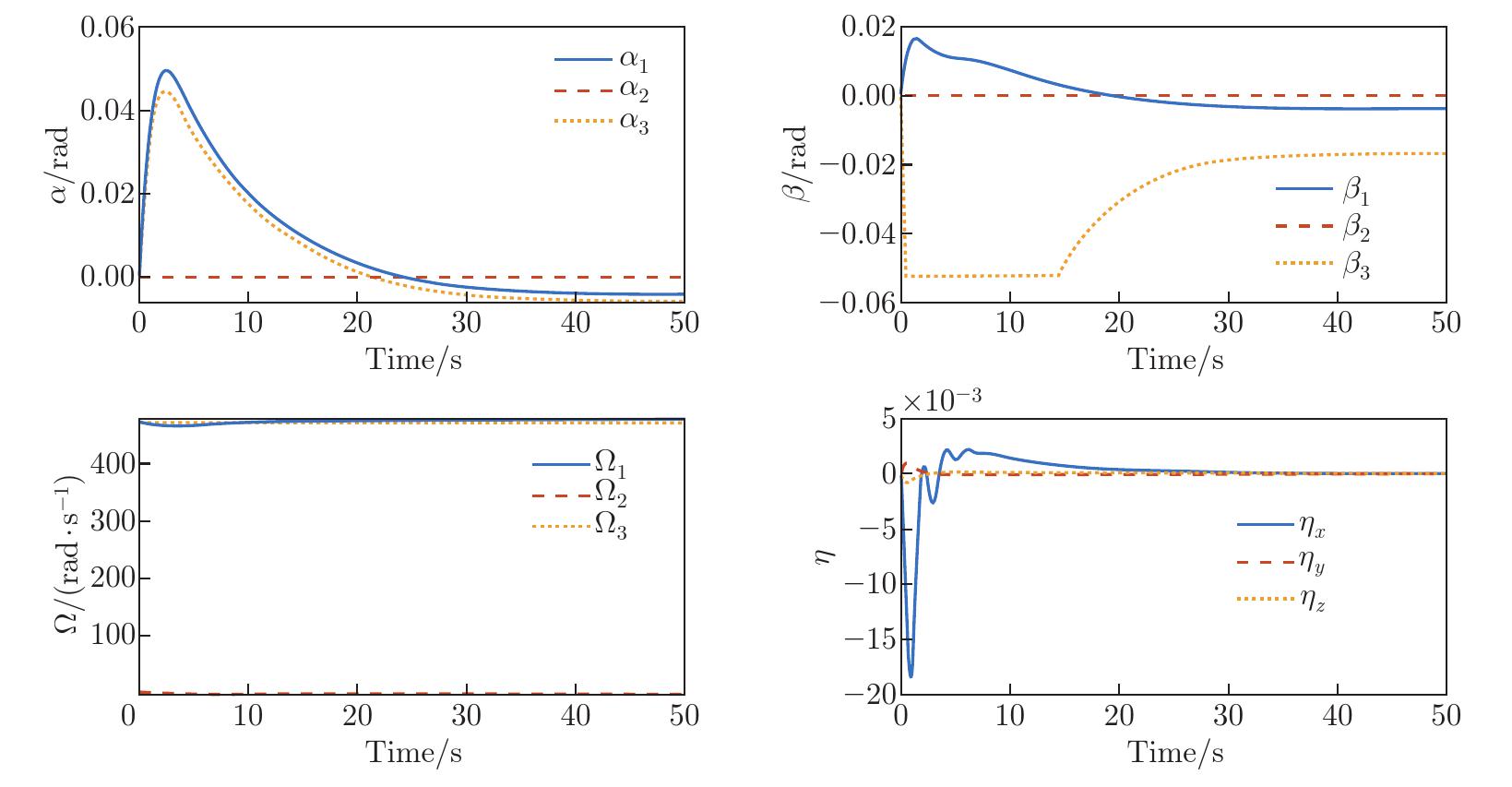
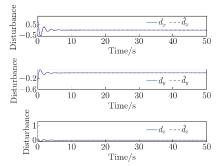
Fig. 14
The disturbance estimation during single actuator failure scenario (color online)"
| [1] | TUYSUZ, A., ACHTNICH, T., ZWYSSIG, C., and KOLAR, J. A 300 000-r/min magnetically levitated reaction wheel demonstrator. IEEE Transactions on Industrial Electronics, 66(8), 6404–6407 (2019) |
| [2] | RAJAGOPAL, K. and SIVADASAN, K. Low-stiction magnetic bearing for satellite application. Journal of Applied Physics, 91, 6994–6996 (2002) |
| [3] | XIANG, B., WEN, T., and LIU, Z. Vibration analysis, measurement and balancing of flywheel rotor suspended by active magnetic bearing. Measurement, 197, 111305 (2022) |
| [4] | YU, Y., FANG, J., XIANG, B., and WANG, C. Adaptive back-stepping tracking control for rotor shaft tilting of active magnetically suspended momentum wheel. ISA Transactions, 53(6), 1892–1900 (2014) |
| [5] | WEI, C., LI, Y., YIN, Z., ZHOU, L., and FENG, J. On finite-time anti-saturated proximity control with a tumbling non-cooperative space target. Space: Science & Technology, 3, 0045 (2023) |
| [6] | WEI, C., HUANG, G., YIN, Z., and CHEN, Q. Analytic optimal pose tracking control in close-range proximity operations with a non-cooperative target. Chinese Journal of Aeronautics, 37(5), 410–425 (2024) |
| [7] | CHEN, X., CAI, Y., and REN, Y. Spacecraft attitude control and vibration suppression integration based on single gimbal magnetically suspended control moment gyroscope pyramid configuration. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 233(8), 2673–2684 (2019) |
| [8] | HOWARD, S., DELLACORTE, C., and DUBE, M. Magnetic Levitation for Long-life Space Mechanisms: Technology Assessment and Remaining Challenges, National Aeronautics and Space Administration, Ohio (2019) |
| [9] | LI, D., ZHONG, L., ZHU, W., XU, Z., TANG, Q., and ZHAN, W. A survey of space robotic technologies for on-orbit assembly. Space: Science & Technology, 2022, 1–13 (2022) |
| [10] | CHEN, T., SHAN, J., WEN, H., and XU, S. Review of attitude consensus of multiple spacecraft. Astrodynamics, 6, 329–356 (2022) |
| [11] | SHI, K., LIU, C., YUE, X., and SUN, Z. Coupled orbit-attitude dynamics and trajectory tracking control for spacecraft electromagnetic docking. Applied Mathematical Modelling, 101, 533–572 (2022) |
| [12] | XIE, M., CHEN, T., NI, S., and FENG, C. Flexible payload transportation using cooperative space manipulators with statics compensation. ISA Transactions (2024) https://doi.org/10.1016/j.isatra.2024.05.03 |
| [13] | ZHANG, J. R. Steering laws analysis of SGCMGs based on singular value decomposition theory. Applied Mathematics and Mechanics (English Edition), 29(8), 1013–1021 (2008) https://doi.org/10.1007/s10483-008-0805-2 |
| [14] | TANG, J., SUN, J., FANG, J., and SAM, G. S. Low eddy loss axial hybrid magnetic bearing with gimballing control ability for momentum flywheel. Journal of Magnetism and Magnetic Materials, 329, 153–164 (2013) |
| [15] | SEDDON, J. and PECHEV, A. 3D wheel: a single actuator providing three-axis control of satellites. Journal of Spacecraft and Rockets, 49, 553–556 (2012) |
| [16] | ZHANG, R., YU, Y., HAN, C., and YANG, Z. An anti-saturation steering law for three dimensional magnetically suspended wheel cluster with angle constraint. Acta Astronautica, 151, 467–474 (2018) |
| [17] | TAYEBI, J., HAN, C., and YU, Y. High accuracy disturbance observer-based agile attitude stabilization with three-dimensional MSW. Aircraft Engineering and Aerospace Technology, 93(5), 862–869 (2021) |
| [18] | YU, Y., FANG, J., and YANG, Z. Torque distribution of the integrated magnetically suspended inertia actuator for attitude maneuvers. Acta Astronautica, 119, 71–78 (2016) |
| [19] | TAYEBI, J., HAN, C., and YU, Y. Disturbance observer backstepping sliding mode agile attitude control of satellite based on the anti-saturation hybrid actuator of the magnetorquer and magnetically suspended wheel. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 236(13), 2817–2828 (2022) |
| [20] | YU, Y., YANG, Z., HAN, C., and LIU, H. Fuzzy adaptive back-stepping sliding mode controller for high-precision deflection control of the magnetically suspended momentum wheel. IEEE Transactions on Industrial Electronics, 65(4), 3530–3538 (2018) |
| [21] | HAN, C., WANG, X., YU, Y., and YANG, Z. A non-saturated sliding-mode control of shaft deflection for magnetically suspended momentum wheel with coupled disturbance and saturated amplifier. Acta Astronautica, 139, 233–242 (2017) |
| [22] | LIU, H. and XIANG, B. Two-DOFs active deflection control of MSW based on fractional-order integral smc method. Mechanical Systems and Signal Processing, 209, 111099 (2024) |
| [23] | TANG, J. H., LI, C. F., ZHOU, J., and WU, Z. W. Research on modeling and self-excited vibration mechanism in magnetic levitation-collision interface coupling system. Applied Mathematics and Mechanics (English Edition), 45(1), 873–890 (2024) https://doi.org/10.1007/s10483-024-3710-6 |
| [24] | XIANG, L. and CAI, G. Review of dynamics and active control of large-scale space membrane antenna. Astrodynamics, 8, 1–26 (2024) |
| [25] | HU, W. and DENG, Z. A review of dynamic analysis on space solar power station. Astrodynamics, 7, 115–130 (2023) |
| [26] | YIN, T. T., DENG, Z. C., HU, W. P., and WANG, X. D. Dynamic modeling and simulation of deploying process for space solar power satellite receiver. Applied Mathematics and Mechanics (English Edition), 39(2), 261–274 (2018) https://doi.org/10.1007/s10483-018-2293-6 |
| [27] | FENG, X., JIA, Y., and XU, S. Dynamics of flexible multibody systems with variable-speed control moment gyroscopes. Aerospace Science and Technology, 79, 554–569 (2018) |
| [28] | JIA, S. and SHAN, J. Flexible structure vibration control using double-gimbal variable-speed control moment gyros. Journal of Guidance, Control, and Dynamics, 44, 1–13 (2021) |
| [29] | JIA, S., JIA, Y., XU, S., and HU, Q. Maneuver and active vibration suppression of free-flying space robot. IEEE Transactions on Aerospace and Electronic Systems, 54(3), 1115–1134 (2018) |
| [30] | GUO, J., CHEN, X., ZHU, M., and ZHOU, Q. Integrated control of attitude maneuver and vibration suppression using pyramid-type SGCMGs. IEEE Transactions on Aerospace and Electronic Systems, 58(1), 17–26 (2021) |
| [31] | GUO, J., YUE, C., JIA, S., and CAO, X. Plate-like flexible spacecraft modeling and distribution of control moment gyroscopes. Space: Science & Technology, 3, 0068 (2023) |
| [32] | WANG, L., ZHONG, C., GUO, Y., WU, Y., and GUO, J. Robust adaptive attitude control for flexible spacecraft in the presence of SGCMG friction nonlinearity. International Journal of Robust and Nonlinear Control, 28(9), 3324–3341 (2018) |
| [33] | TAYEBI, J., CHEN, T., and WANG, H. Dynamics and control of flexible satellite using reaction sphere actuators. Space: Science & Technology, 3, 0077 (2023) |
| [34] | CHEN, W. H., YANG, J., GUO, L., and LI, S. Disturbance-observer-based control and related methods-an overview. IEEE Transactions on Industrial Electronics, 63(2), 1083–1095 (2016) |
| [35] | CHEN, W. H. Disturbance observer based control for nonlinear systems. IEEE/ASME Transactions on Mechatronics, 9(4), 706–710 (2004) |
| [36] | LYU, B., LIU, C., and YUE, X. Integrated predictor-observer feedback control for vibration mitigation of large-scale spacecraft with unbounded input time delay. IEEE Transactions on Aerospace and Electronic Systems (2024) https://doi.org/10.1109/TASE.2024.3468128 |
| [37] | LIU, C., YUE, X., ZHANG, J., and SHI, K. Active disturbance rejection control for delayed electromagnetic docking of spacecraft in elliptical orbits. IEEE Transactions on Aerospace and Electronic Systems, 58(3), 2257–2268 (2022) |
| [38] | SHI, Q., WANG, H., CHENG, H., WANG, M., CHENG, F., and LIU, F. Fuzzy disturbance observer-based modified variable gains super-twisting sliding mode composite control for a two-axis airborne optoelectronic stabilized platform. Optik, 228, 166132 (2021) |
| [39] | DOU, L., DU, M., ZHANG, X., DU, H., and LIU, W. Fuzzy disturbance observer-based sliding mode control for liquid-filled spacecraft with flexible structure under control saturation. IEEE Access, 7, 149810–149819 (2019) |
| [40] | LIU, E., YANG, Y., and YAN, Y. Spacecraft attitude tracking for space debris removal using adaptive fuzzy sliding mode control. Aerospace Science and Technology, 107, 106310 (2020) |
| [41] | ZHANG, H., WANG, P., TANG, G., and BAO, W. Fuzzy disturbance observer-based dynamic sliding mode control for hypersonic morphing vehicles. Aerospace Science and Technology, 142, 108633 (2023) |
| [42] | YAN, R. and WU, Z. Attitude stabilization of flexible spacecrafts via extended disturbance observer based controller. Acta Astronautica, 133, 73–80 (2017) |
| [43] | XU, Y. T., WU, A. G., ZHU, Q. H., and DONG, R. Q. Observer-based sliding mode control for flexible spacecraft with external disturbance. IEEE Access, 8, 32477–32484 (2020) |
| [44] | GUO, J., GENG, Y., WU, B., and KONG, X. Vibration suppression of flexible spacecraft during attitude maneuver using CMGs. Aerospace Science and Technology, 72, 183–192 (2018) |
| [45] | WU, P., WEN, H., CHEN, T., and JIN, D. Model predictive control of rigid spacecraft with two variable speed control moment gyroscopes. Applied Mathematics and Mechanics (English Edition), 38(11), 1551–1564 (2017) https://doi.org/10.1007/s10483-017-2278-9 |
| [46] | GENNARO, S. D. Output stabilization of flexible spacecraft with active vibration suppression. IEEE Transactions on Aerospace and Electronic Systems, 39(3), 747–759 (2003) |
| [47] | HU, Q., CAO, J., and ZHANG, Y. Robust backstepping sliding mode attitude tracking and vibration damping of flexible spacecraft with actuator dynamics. Journal of Aerospace Engineering, 22(2), 139–152 (2009) |
| [48] | CHEN, T. and SHAN, J. Continuous constrained attitude regulation of multiple spacecraft on SO(3). Aerospace Science and Technology, 99, 105769 (2020) |
| [49] | SPOONER, J. and PASSINO, K. Decentralized adaptive control of nonlinear systems using radial basis neural networks. IEEE Transactions on Automatic Control, 44(11), 2050–2057 (1999) |
| [50] | KALIL, H. K. Control of Nonlinear Systems, Prentice Hall, New York (2002) |
| [51] | HANGOS, K. M., BOKOR, J., and SZEDERKENYI, G. Analysis and Control of Nonlinear Process Systems, Springer Science & Business Media, London (2006) |
| [52] | CAI, W., LIAO, X. H., and SONG, Y. D. Indirect robust adaptive fault-tolerant control for attitude tracking of spacecraft. Journal of Guidance, Control, and Dynamics, 31(5), 1456–1463 (2008) |
| [1] | H. S. LEE, H. X. CAO, D. JUNG, C. S. KIM. Model-based adaptive locomotion and clustering control of microparticles through ultrasonic topological charge modulation [J]. Applied Mathematics and Mechanics (English Edition), 2023, 44(4): 623-640. |
| [2] | Lin DU, Yong YANG, Youming LEI. Synchronization in a fractional-order dynamic network with uncertain parameters using an adaptive control strategy [J]. Applied Mathematics and Mechanics (English Edition), 2018, 39(3): 353-364. |
| [3] | GUO Yi-shen;CHEN Li. Adaptive neural network control for coordinated motion of a dual-arm space robot system with uncertain parameters [J]. Applied Mathematics and Mechanics (English Edition), 2008, 29(9): 1131-1140 . |
| [4] | Alexey Bobtsov;Nikolay Nikolaev;Olga Slita. Control of chaotic oscillations of a satellite [J]. Applied Mathematics and Mechanics (English Edition), 2007, 28(7): 893-900 . |
| [5] | MU Xiao-wu;GUO Xiao-li;CHENG Gui-fang. ADAPTIVE H-INFINITY CONTROL OF A CLASS OF UNCERTAIN NONLINEAR SYSTEMS [J]. Applied Mathematics and Mechanics (English Edition), 2006, 27(9): 1207-1215 . |
| [6] | MU Xiao-wu;YU Ji-min;CHENG Gui-fang. ADAPTIVE REGULATION OF HIGH ORDER NONHOLONOMIC SYSTEMS [J]. Applied Mathematics and Mechanics (English Edition), 2006, 27(4): 501-507 . |
| [7] | WANG Yi-Jing;WANG Long. ADAPTIVE GENERALIZED PREDICTIVE CONTROL OF SWITCHED SYSTEMS [J]. Applied Mathematics and Mechanics (English Edition), 2005, 26(5): 647-. |
| [8] | MU Xiao-wu;YU Ji-min;BI Wei-ping;CHENG Dai-zhan. ROBUST ADAPTIVE CONTROL OF NONHOLONOMIC SYSTEMS WITH UNCERTAINTIES [J]. Applied Mathematics and Mechanics (English Edition), 2004, 25(3): 329-337. |
| [9] | Mu Xiaowu;Zhang Huaizhou . NEURAL NETWORK-BASED ADAPTIVE CONTROL OF A CLASS OF UNCERTAIN NONLINEAR SYSTEMS [J]. Applied Mathematics and Mechanics (English Edition), 1997, 18(1): 91-95. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||





 Email Alert
Email Alert RSS
RSS