Applied Mathematics and Mechanics (English Edition) ›› 2024, Vol. 45 ›› Issue (12): 2183-2202.doi: https://doi.org/10.1007/s10483-024-3191-6
• Articles • Previous Articles Next Articles
Yiheng YANG1, Kai ZHANG1,2,*( ), Zhihua CHEN3, Bin LI1
), Zhihua CHEN3, Bin LI1
Received:2024-07-12
Online:2024-12-01
Published:2024-11-30
Contact:
Kai ZHANG, E-mail: zhangkaihit@gmail.comSupported by:2010 MSC Number:
Yiheng YANG, Kai ZHANG, Zhihua CHEN, Bin LI. Distributionally robust model predictive control for constrained robotic manipulators based on neural network modeling. Applied Mathematics and Mechanics (English Edition), 2024, 45(12): 2183-2202.

Fig. 1
Proposed algorithm structure (color online)"
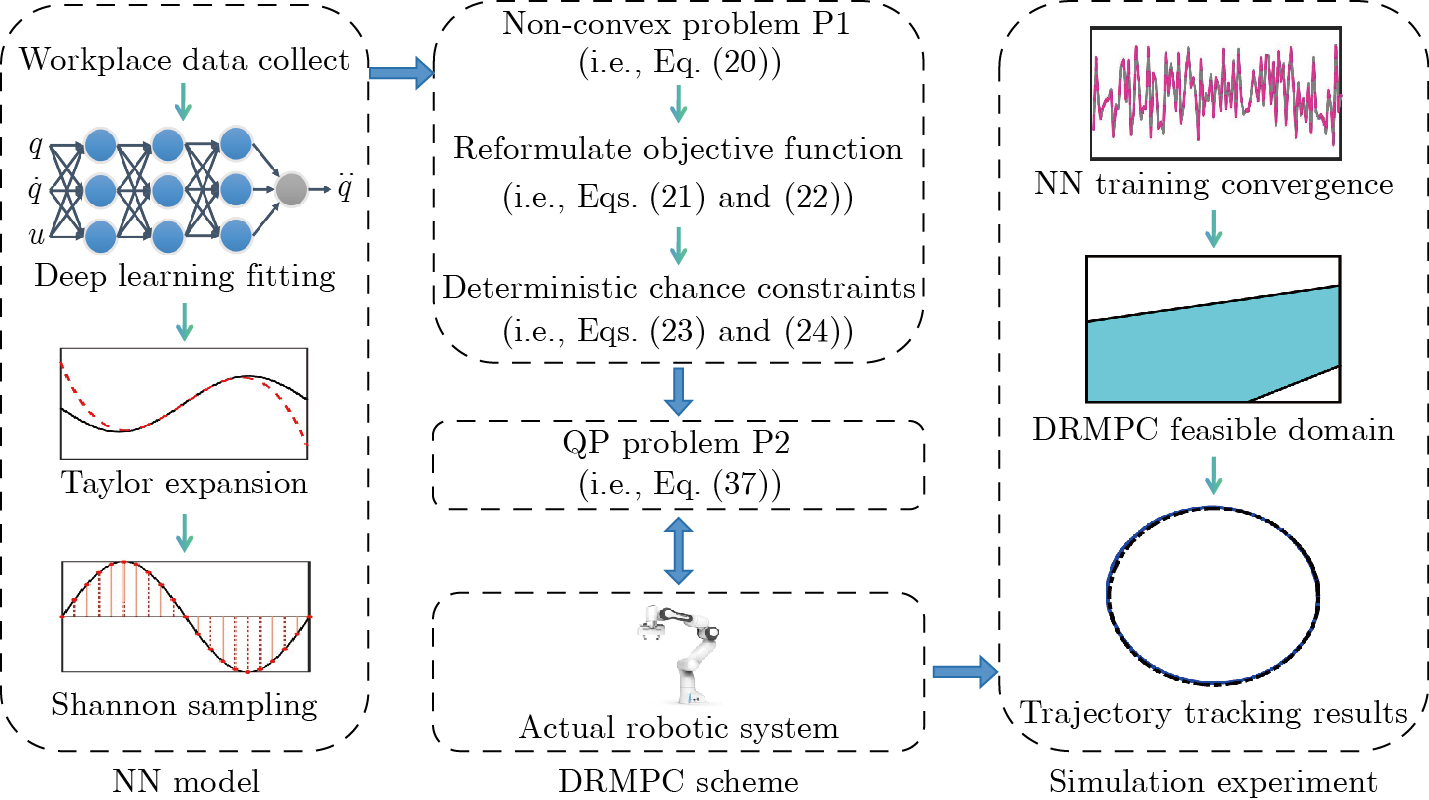

Fig. 2
Fitting results (color online)"
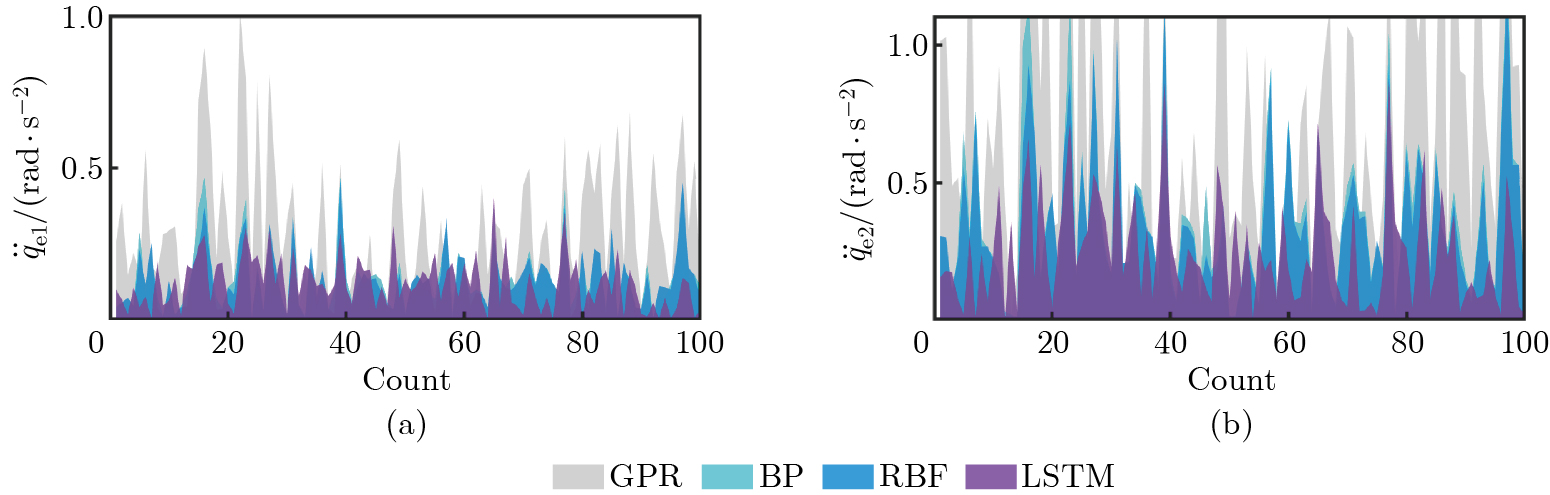
Fig. 3
Feasible domain of the control torque (color online)"
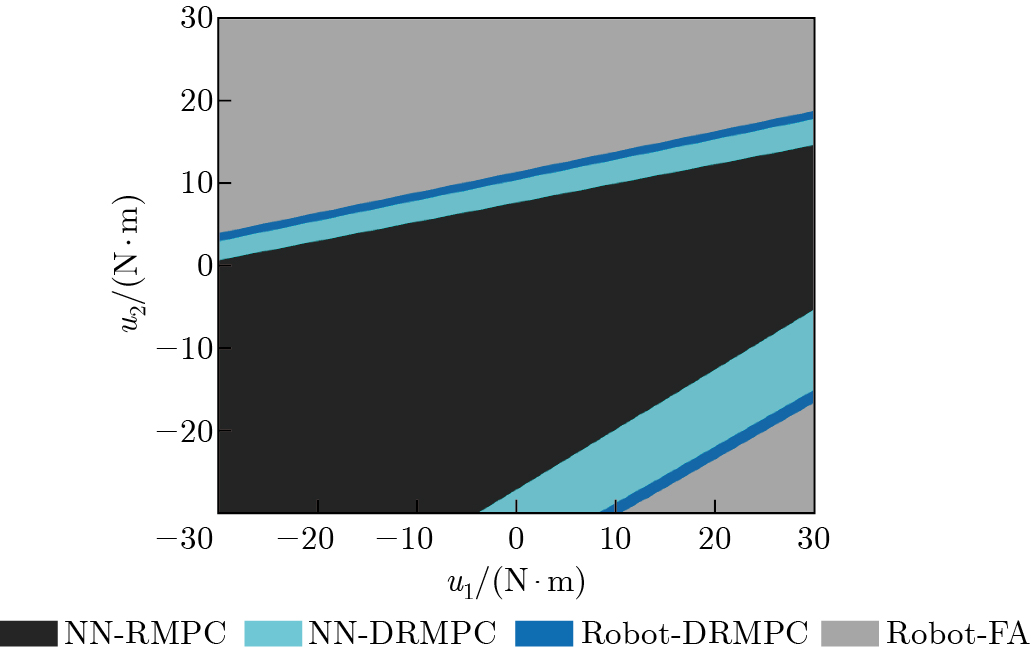
Fig. 4
Scenario 1: MC result and mean trajectory of the joint angle $ q_1 $ (color online)"
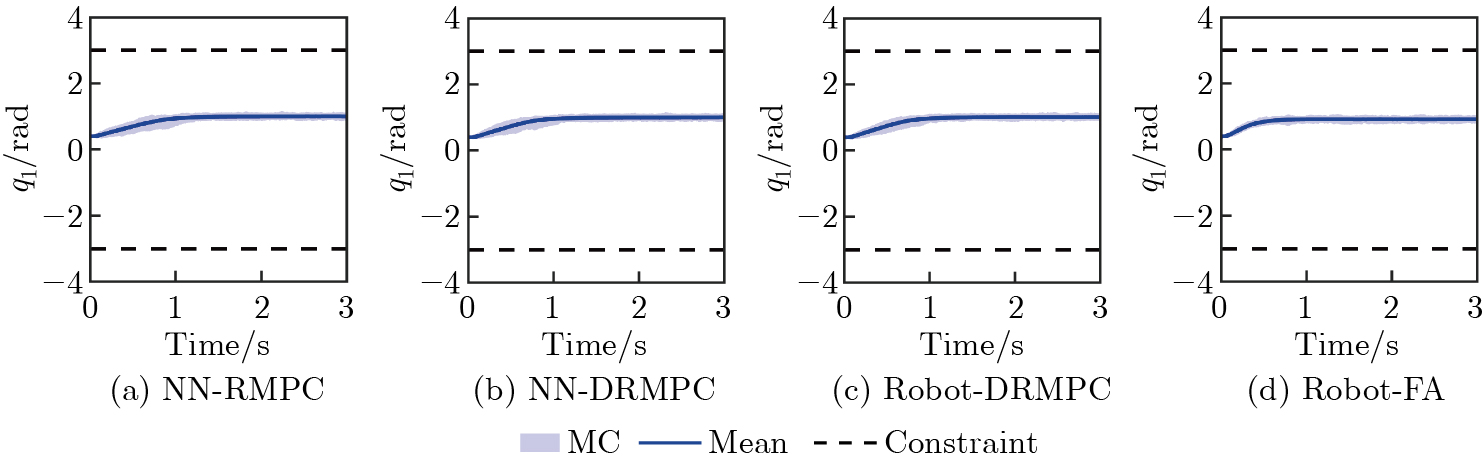
Fig. 5
Scenario 1: MC result and mean trajectory of the joint angle $ q_2 $ (color online)"
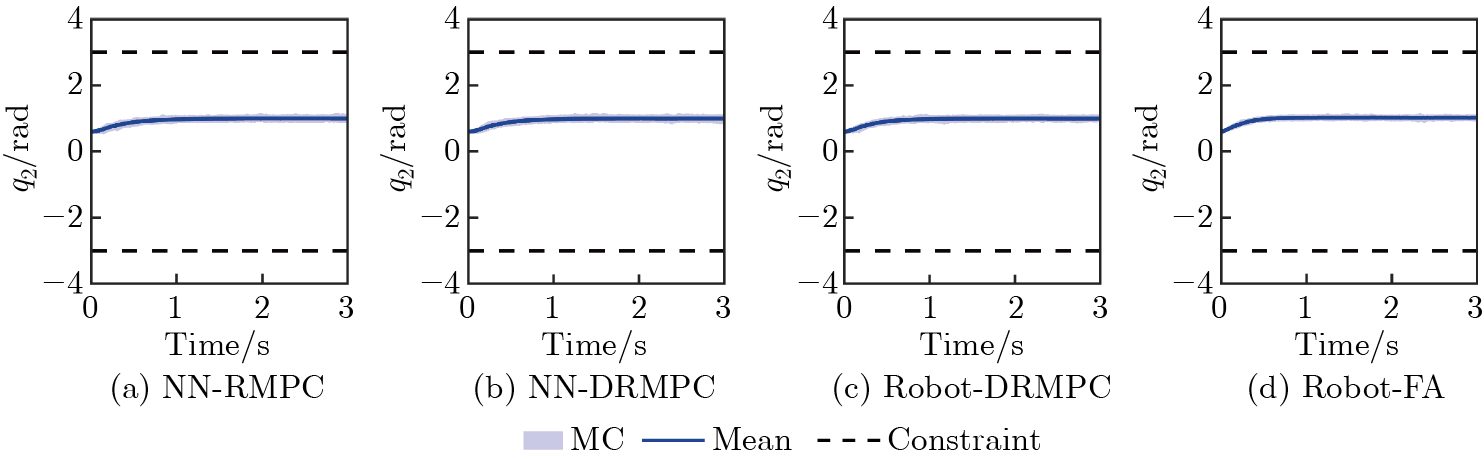
Fig. 6
Scenario 1: MC result and mean trajectory of the angular velocity $ \dot{q}_1 $ (color online)"
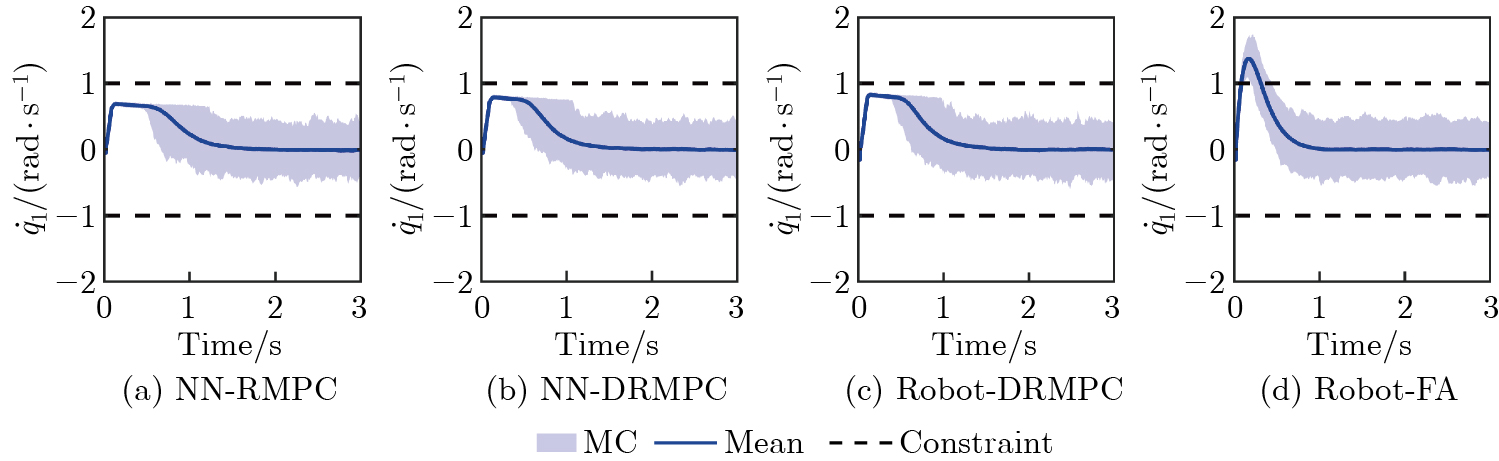
Fig. 7
Scenario 1: MC result and mean trajectory of the angular velocity $ \dot{q}_2 $ (color online)"
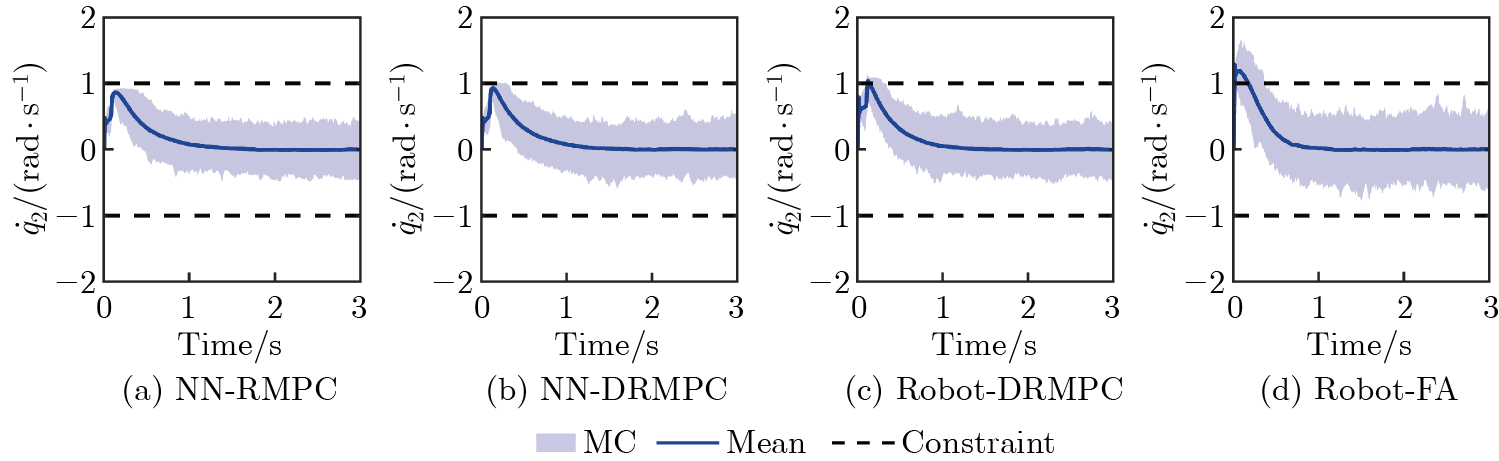
Fig. 8
Scenario 1: MC result and mean trajectory of the joint control torque $ u_1 $ (color online)"
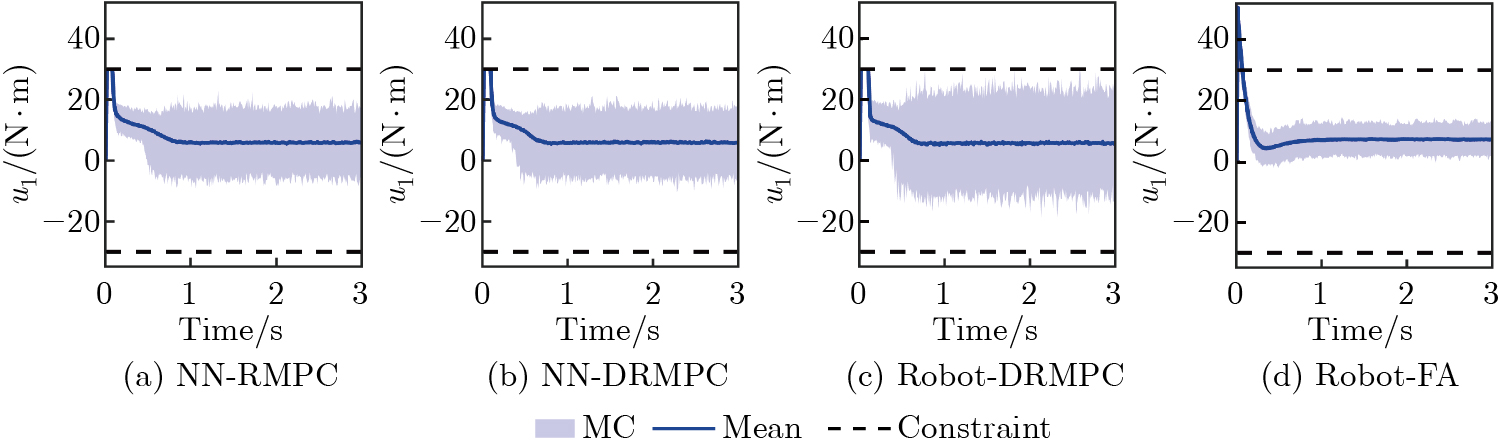

Fig. 9
Scenario 1: MC result and mean trajectory of the joint control torque $ u_2 $ (color online)"
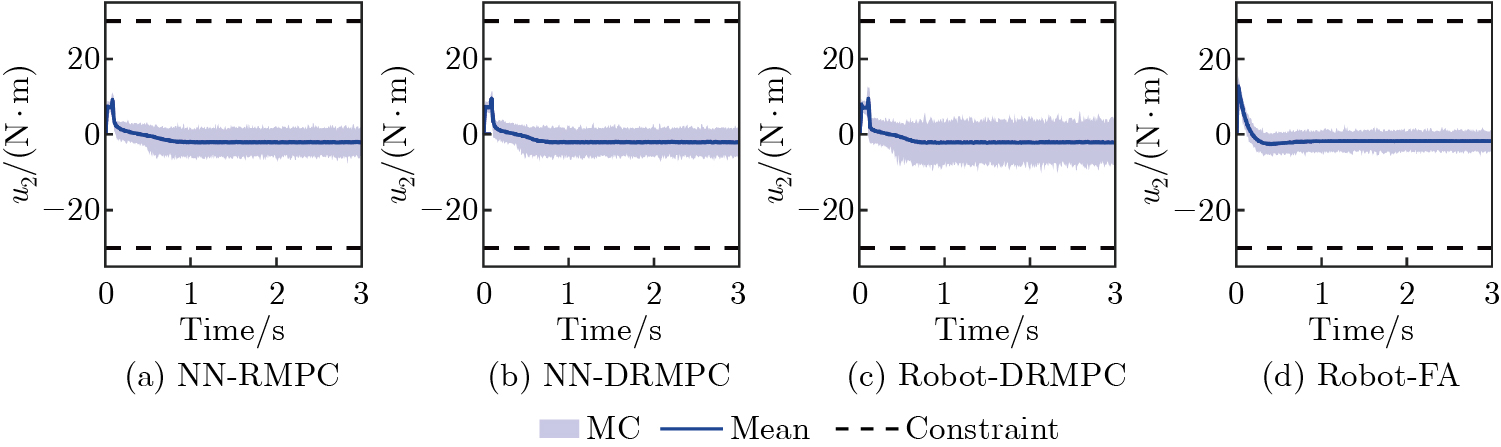

Fig. 10
Scenario 1: mean trajectory of the joint tracking error (color online)"
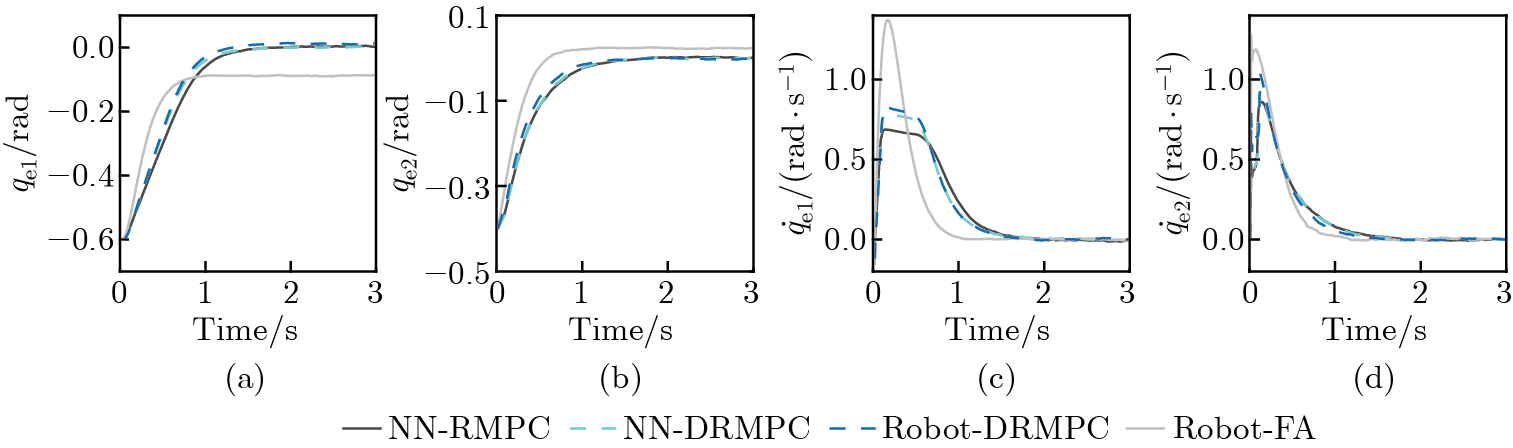
Table 1
Scenario 1: constraint violation count"
| State | Method | |||
| NN-RMPC | NN-DRMPC | Robot-DRMPC | Robot-FA | |
| 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 1 000 | |
| 0 | 16 | 804 | 1 000 | |
| 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | |
| Percentage | 0.0% | 1.6% | 80.4% | 100.0% |

Fig. 11
Scenario 2: tracking trajectory of manipulator's end effector in the Cartesian coordinate (color online)"
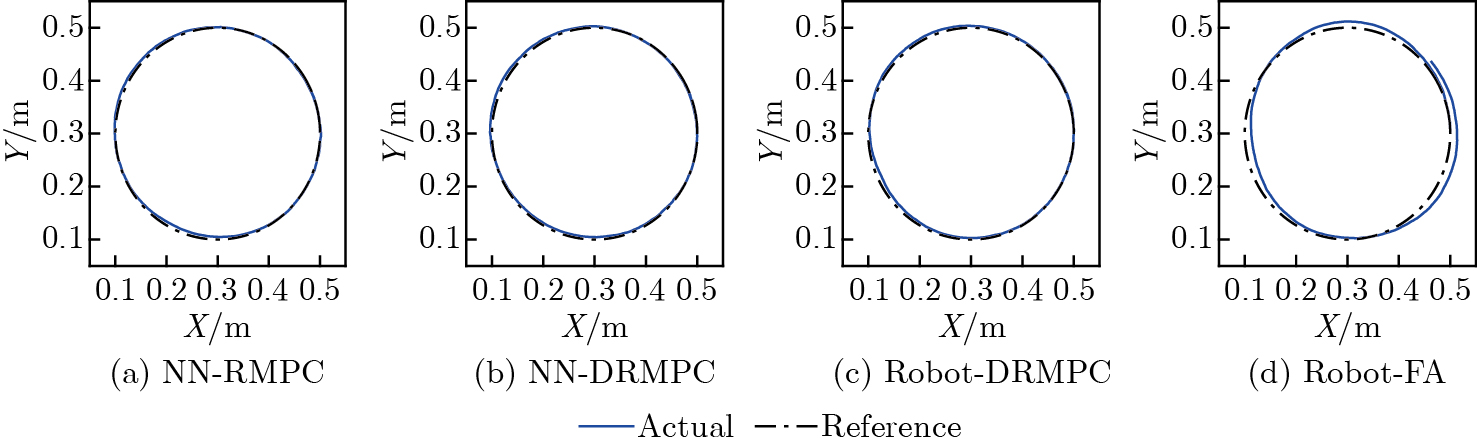
Fig. 12
Scenario 2: MC result and mean trajectory of the joint angle $ q_1 $ (color online)"
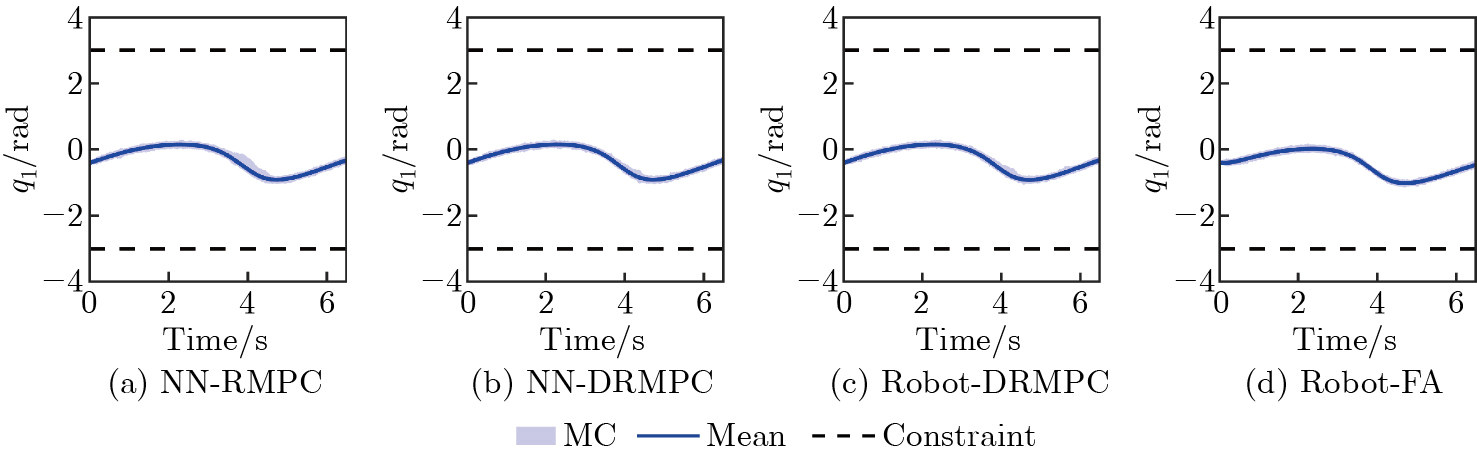
Fig. 13
Scenario 2: MC result and mean trajectory of the joint angle $ q_2 $ (color online)"
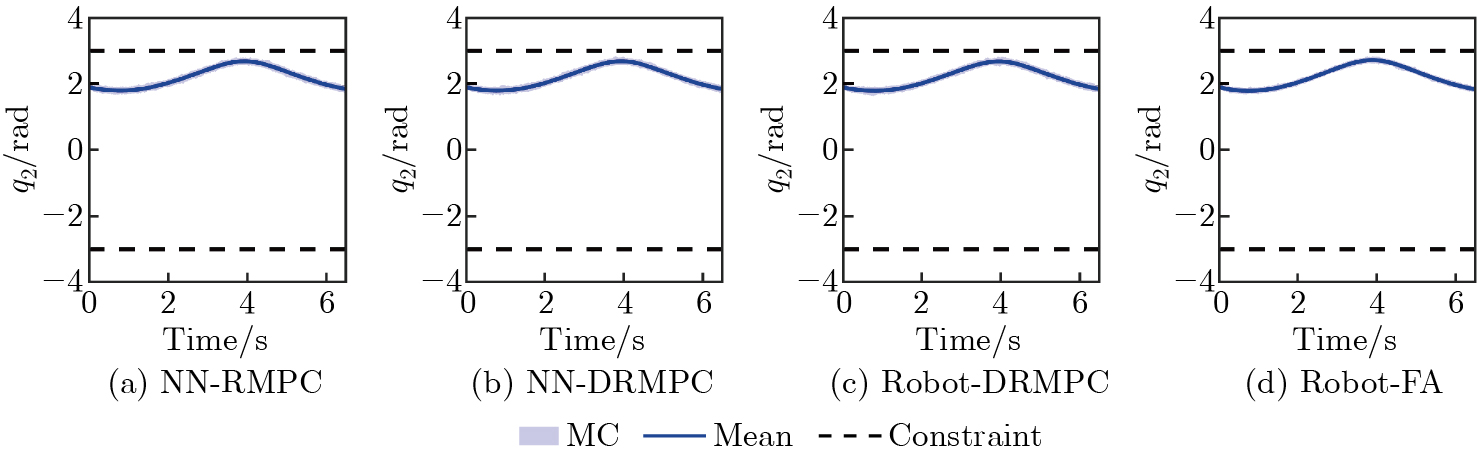
Fig. 14
Scenario 2: MC result and mean trajectory of the angular velocity $ \dot{q}_1 $ (color online)"
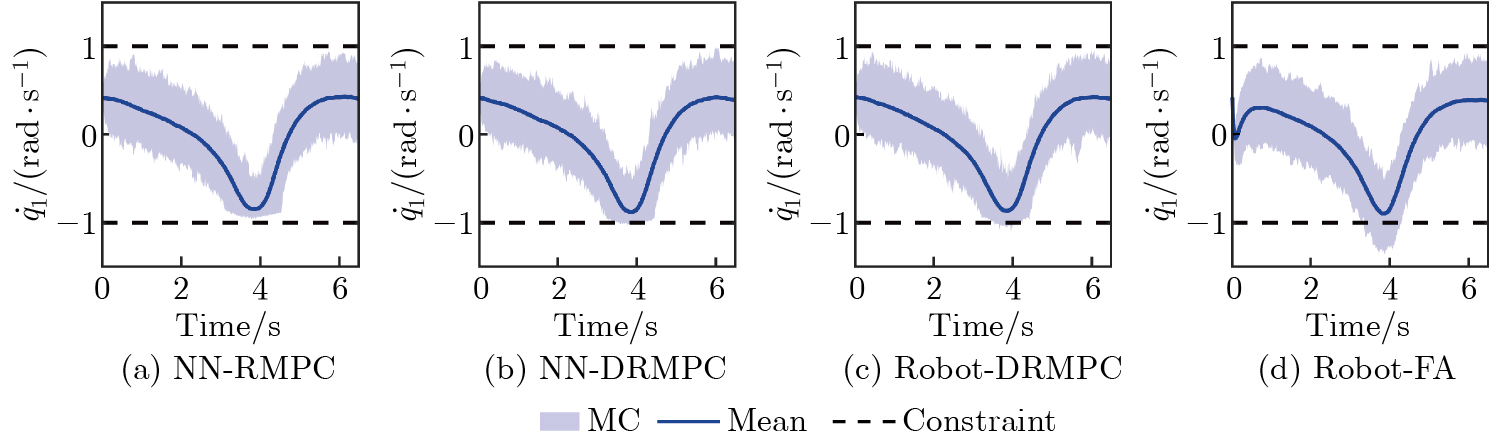
Fig. 15
Scenario 2: MC result and mean trajectory of the angular velocity $ \dot{q}_2 $ (color online)"
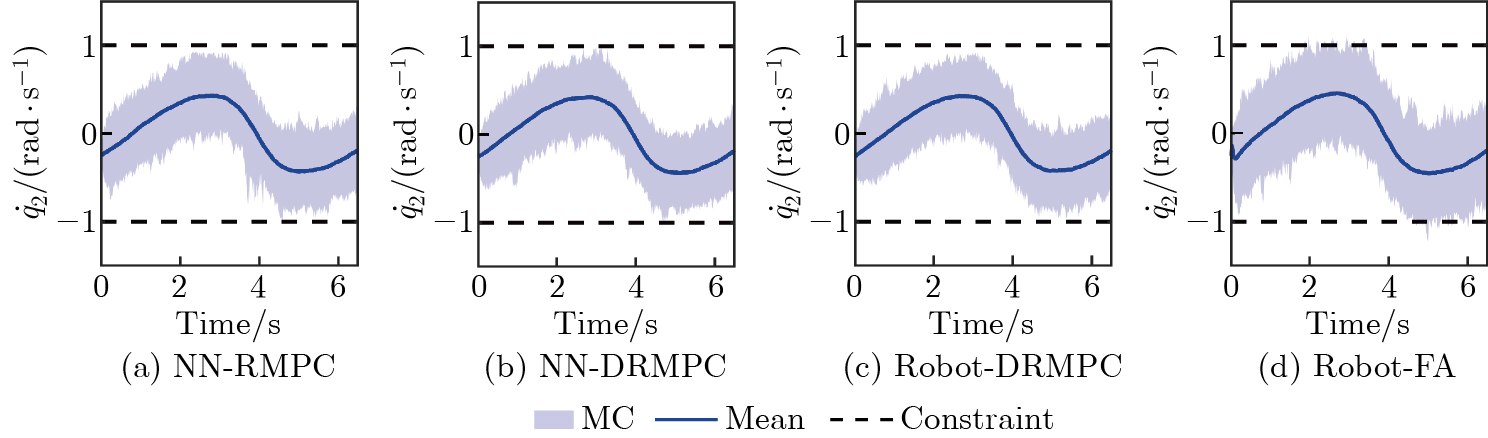
Fig. 16
Scenario 2: MC result and mean trajectory of the joint control torque $ u_1 $ (color online)"
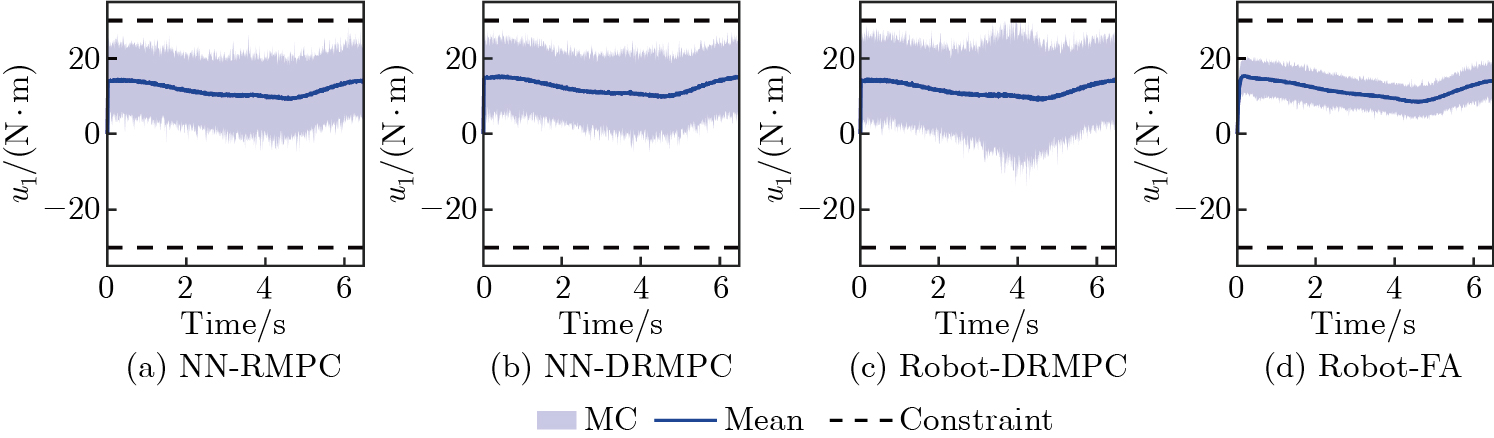
Fig. 17
Scenario 2: MC result and mean trajectory of the joint control torque $ u_2 $ (color online)"
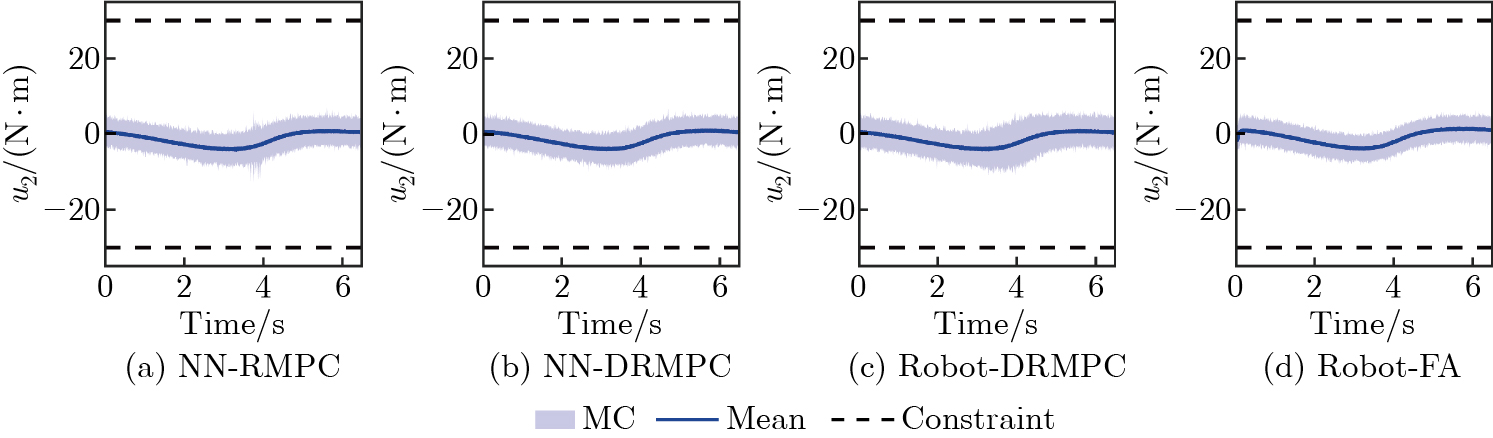
Fig. 18
Scenario 2: mean trajectory of the joint tracking error (color online)"
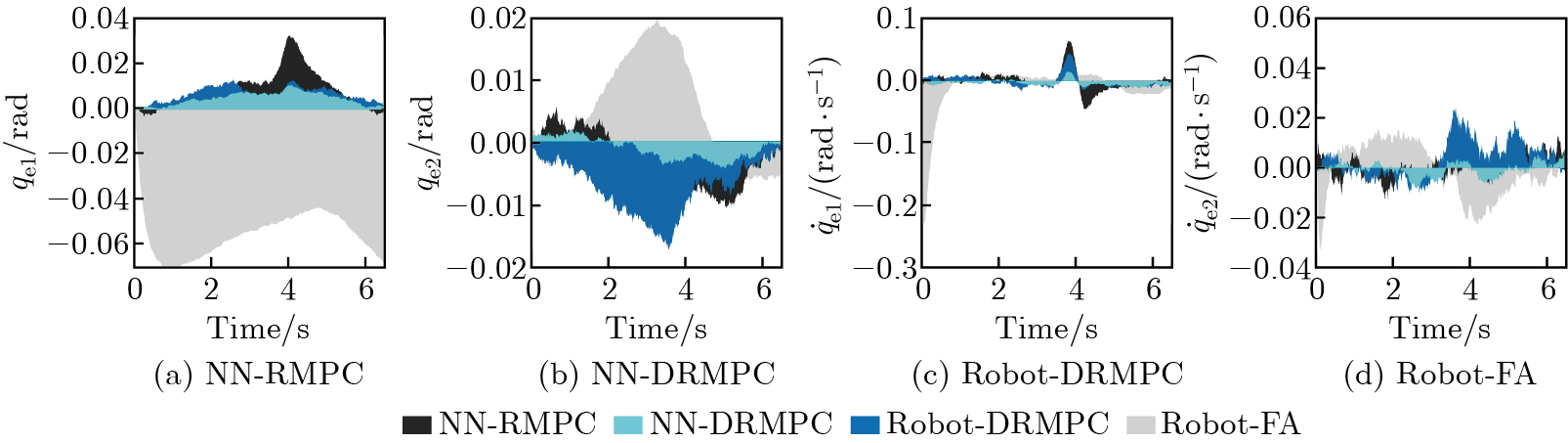
Table 2
Scenario 2: constraint violation count"
| State | Method | |||
| NN-RMPC | NN-DRMPC | Robot-DRMPC | Robot-FA | |
| 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | |
| 0 | 47 | 133 | 464 | |
| 0 | 1 | 0 | 45 | |
| 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | |
| Percentage | 0.0% | 4.7% | 13.3% | 46.4% |
| 1 | ERIK, W., and STIG, M. Nonlinear gray-box identification using local models applied to industrial robots. Automatica, 47 (4), 650- 660 (2011) |
| 2 |
DONG, Q. H., and CHEN, L. Impact dynamics analysis of free-floating space manipulator capturing satellite on orbit and robust adaptive compound control algorithm design for suppressing motion. Applied Mathematics and Mechanics (English Edition), 35 (4), 413- 422 (2014)
doi: 10.1007/s10483-014-1801-7 |
| 3 | ZHU, C. Z., JIANG, Y. M., and YANG, C. H. Fixed-time neural control of robot manipulator with global stability and guaranteed transient performance. IEEE Transactions on Industrial Electronics, 70 (1), 803- 812 (2023) |
| 4 | KORAYEM, M. H., and NIKOOBIN, A. Maximum payload path planning for redundant manipulator using indirect solution of optimal control problem. The International Journal of Advanced Manufacturing Technology, 44, 725- 736 (2009) |
| 5 | ZHANG, S., DONG, Y. T., OUYANG, Y. C., YIN, Z., and PENG, K. X. Adaptive neural control for robotic manipulators with output constraints and uncertainties. IEEE Transactions on Neural Networks and Learning Systems, 29 (11), 5554- 5564 (2018) |
| 6 | TIAN, G., LI, B., ZHAO, Q., and DUAN, G. High-precision trajectory tracking control for free-flying space manipulators with multiple constraints and system uncertainties. IEEE Transactions on Aerospace and Electronic Systems, 60 (1), 789- 801 (2024) |
| 7 |
GUO, Y. S., and CHEN, L. Adaptive neural network control for coordinated motion of a dual-arm space robot system with uncertain parameters. Applied Mathematics and Mechanics (English Edition), 29 (9), 1131- 1140 (2008)
doi: 10.1007/s10483-008-0903-z |
| 8 |
AN, C., ZHOU, J., and WANG, K. A. Adaptive state-constrained/model-free iterative sliding mode control for aerial robot trajectory tracking. Applied Mathematics and Mechanics (English Edition), 45 (4), 603- 618 (2024)
doi: 10.1007/s10483-024-3103-8 |
| 9 | KORAYEM, A. H., NEKOO, S. R., and KORAYEM, M. H. Sliding mode control design based on the state-dependent Riccati equation: theoretical and experimental implementation. International Journal of Control, 92 (9), 2136- 2149 (2018) |
| 10 | SAMIR, B., EL-HADI, G., and YOUCEF, Z. A. Model predictive control of a three degrees of freedom manipulator robot. 2019 International Conference on Advanced Systems and Emergent Technologies, IEEE, Hammamet, 84–89 (2019) |
| 11 | WEI, J., and ZHU, B. Model predictive control for trajectory-tracking and formation of wheeled mobile robots. Neural Computing & Applications, 34, 16351- 16365 (2022) |
| 12 | ZHANG, Y. H., ZHAO, X. W., TAO, B., and DING, H. Multi-objective synchronization control for dual-robot interactive cooperation using nonlinear model predictive policy. IEEE Transactions on Industrial Electronics, 70 (1), 582- 593 (2023) |
| 13 | DAI, L., YU, Y. T., ZHAI, D. H., HUANG, T., and XIA, Y. Q. Robust model predictive tracking control for robot manipulators with disturbances. IEEE Transactions on Industrial Electronics, 68 (5), 4288- 4297 (2021) |
| 14 | SUN, Z. Q., DAI, L., XIA, Y. Q., and LIU, K. Event-based model predictive tracking control of nonholonomic systems with coupled input constraint and bounded disturbances. IEEE Transactions on Automatic Control, 63 (2), 608- 615 (2018) |
| 15 | MARK, C., BASIL, K., RAKOVI, S. V., and CHENG, Q. F. Stochastic tubes in model predictive control with probabilistic constraints. IEEE Transactions on Automatic Control, 56 (1), 194- 200 (2010) |
| 16 | LI, B., TAN, Y., WU, A. G., and DUAN, G. R. A distributionally robust optimization based method for stochastic model predictive control. IEEE Transactions on Automatic Control, 67 (11), 5762- 5776 (2022) |
| 17 | DO NASCIMENTO, T. P., BASSO, G. F., and DOREA, C. E. T. Perception-driven motion control based on stochastic nonlinear model predictive controllers. IEEE/ASME Transactions on Mechatronics, 24 (4), 1751- 1762 (2019) |
| 18 | YIN, J. H., SHEN, D., DU, X. P., and LI, L. X. Distributed stochastic model predictive control with Taguchis robustness for vehicle platooning. IEEE Transactions on Intelligent Transportation Systems, 23 (9), 15967- 15979 (2022) |
| 19 | EL-GHAOUI, L., OKS, M., and OUSTRY, F. Worst-case value-at-risk and robust portfolio optimization: a conic programming approach. Operations Research, 51 (4), 543- 556 (2003) |
| 20 | ESFAHANI, P. M., and KUHN, D. Data-driven distributionally robust optimization using the Wasserstein metric: performance guarantees and tractable reformulations. Mathematical Programming, 171, 115- 166 (2018) |
| 21 | TAN, Y., YANG, J., CHEN, W. H., and LI, S. H. A distributionally robust optimization approach to two-sided chance-constrained stochastic model predictive control with unknown noise distribution. IEEE Transactions on Automatic Control, 69 (1), 574- 581 (2023) |
| 22 | FRANCESCO, M., TYLER, S., and JOHN, L. Data-driven distributionally robust MPC for systems with uncertain dynamics. 2022 IEEE 61st Conference on Decision and Control (CDC), IEEE, Cancun, 4788–4793 (2022) |
| 23 | HUANG, W. J., ZHENG, W. Y., and DAVID, J. H. Distributionally robust optimal power flow in multi-microgrids with decomposition and guaranteed convergence. IEEE Transactions on Smart Grid, 12 (1), 43- 55 (2021) |
| 24 | NGUYEN, H. T., and CHOI, D. H. Decentralized distributionally robust coordination between distribution system and charging station operators in unbalanced distribution systems. IEEE Transactions on Smart Grid, 14 (3), 2164- 2177 (2023) |
| 25 | ASTGHIK, H., and INSOON, Y. Wasserstein distributionally robust motion control for collision avoidance using conditional value-at-risk. IEEE Transactions on Robotics, 38 (2), 939- 957 (2022) |
| 26 | MARTA, F. and JOHN, L. Data-driven distributionally robust bounds for stochastic model predictive control. 2022 IEEE 61st Conference on Decision and Control (CDC), IEEE, Cancun, 3611–3616 (2022) |
| 27 | LI, H. R. and SHIGERU, Y. Polynomial regression based model-free predictive control for nonlinear systems. 2016 55th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), IEEE, Tsukuba, 578–582 (2016) |
| 28 | RYAN, J. S., and HARRY, H. A. A data-driven approach to prediction and optimal bucket-filling control for autonomous excavators. IEEE Robotics and Automation Letters, 5 (2), 2682- 2689 (2020) |
| 29 | ANANYA, T., SALAH, B., MARK, Z., and TASKIN, P. Probabilistic dynamic modeling and control for skid-steered mobile robots in off-road environments. 2023 IEEE International Conference on Assured Autonomy (ICAA), IEEE, Laurel, 59–63 (2023) |
| 30 | LUKAS, H. W., KIM, P. W., MARCEL, M., and MELANIE, N. Z. Learning-based model predictive control: toward safe learning in control. Annual Review of Control, Robotics, and Autonomous Systems, 3, 269- 296 (2020) |
| 31 | MATHIJS, S., and PANAGIOTIS, P. A general framework for learning-based distributionally robust MPC of Markov jump systems. IEEE Transactions on Automatic Control, 68 (5), 2950- 2965 (2023) |
| 32 | RAMON, I., FEDERICO, S., KEVIN, W., DAVID, H., JURE, L., and MARCO, P. Data-driven model predictive control of autonomous mobility-on-demand systems. 2018 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Brisbane, 6019–6025 (2018) |
| 33 | DOMINIK, S., KASPAR, S., and DIRK, A. Data enhanced model predictive control of a coupled tank system. 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, IEEE, Sapporo, 1646–1651 (2022) |
| 34 | NATHAN, A. S., MATTHEW, B., and CHRISTIAN, G. J. Neural network model predictive motion control applied to automated driving with unknown friction. IEEE Transactions on Control Systems Technology, 30 (5), 1934- 1945 (2022) |
| 35 | KORAYEM, M. H., ADRIANI, H. R., and LADEMAKHI, N. Y. Intelligent time-delay reduction of nonlinear model predictive control (NMPC) for wheeled mobile robots in the presence of obstacles. ISA Transactions, 141, 414- 427 (2023) |
| 36 | CAI, M. X., WANG, Y., WANG, S., WANG, R., and TAN, M. Autonomous manipulation of an underwater vehicle-manipulator system by a composite control scheme with disturbance estimation. IEEE Transactions on Automation Science and Engineering, 21 (1), 1012- 1022 (2023) |
| 37 | ZHU, C. J., CHEN, J. C., MAKOTO, I., and ZHANG, H. Event-triggered deep learning control of quadrotors for trajectory tracking. IEEE Transactions on Industrial Electronics, 571 (3), 2726- 2736 (2023) |
| 38 | LI, G., YU, J. P., and CHEN, X. K. Adaptive fuzzy neural network command filtered impedance control of constrained robotic manipulators with disturbance observer. IEEE Transactions on Neural Networks and Learning Systems, 34 (8), 5171- 5179 (2023) |
| 39 | GEORGE, C. Approximation by superpositions of a sigmoidal function. Mathematics of Control, Signals, and Systems, 2, 303- 314 (1989) |
| 40 | HORNIK, K., STINCHCOMBE, M., and WHITE, H. Multilayer feedforward networks are universal approximators. Neural Networks, 2 (5), 359- 366 (1989) |
| 41 | ABBAS, K., SAEID, H., DOUG, C., and AMIR, F. A. Comprehensive review of neural network-based prediction intervals and new advances. IEEE Transactions on Neural Networks, 22 (9), 1341- 1356 (2011) |
| 42 | FARINA, M., GIULIONI, L., MAGNI, L., and SCATTOLINI, R. An approach to output-feedback MPC of stochastic linear discrete-time systems. Automatica, 55, 140- 149 (2015) |
| 43 | GIUSEPPE, C. C., and LAURENT, E. G. On Distributionally robust chance-constrained linear programs. Journal of Optimization Theory and Applications, 130, 1- 22 (2006) |
| 44 | ZHANG, D. F., SUN, X. M., WU, Z. J., and WANG, W. Dissipativity for a class of stochastic nonlinear systems with state-dependent switching. IEEE Transactions on Circuits and Systems Ⅱ: Express Briefs, 64 (1), 86- 90 (2017) |
| [1] | N. VO, T. LE-DUC, H. TANG, H. NGUYEN-XUAN, S. H. LEE, J. H. LEE. Solving high-dimensional global optimization problems via solution space restructuring with neural network [J]. Applied Mathematics and Mechanics (English Edition), 2026, 47(6): 1383-1400. |
| [2] | Ti CHEN, Songyuan HE, Yankai WANG, Zhengtao WEI, Yingjie CHEN, J. TAYEBI. Dynamics and control for capture mode of drag-free satellite considering nonlinear electrostatic effect [J]. Applied Mathematics and Mechanics (English Edition), 2025, 46(9): 1631-1648. |
| [3] | Mengting LIN, Bin LI, C. CECATI. Distributed stochastic model predictive control for energy dispatch with distributionally robust optimization [J]. Applied Mathematics and Mechanics (English Edition), 2025, 46(2): 323-340. |
| [4] | Zeyu LIU, Yantao YANG, Qingdong CAI. Neural network as a function approximator and its application in solving differential equations [J]. Applied Mathematics and Mechanics (English Edition), 2019, 40(2): 237-248. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||





 Email Alert
Email Alert RSS
RSS